基于NVIDIA Isaac Lab拓展多模態(tài)機器人學習
構建強大的智能機器人需要在復雜環(huán)境中進行測試。然而,在現(xiàn)實世界中收集數(shù)據(jù)不僅成本高昂、耗時漫長,還常....

多家領先企業(yè)集成NVIDIA加速計算和AI技術以提升OT網(wǎng)絡安全
隨著技術和系統(tǒng)在全球各地日益數(shù)字化和互連化,從能源和制造業(yè)到交通運輸和公共事業(yè),運營技術 Opera....
NVIDIA推出代理式AI藍圖與電信推理模型
借助全新開源大型電信模型與 NVIDIA Blueprint,電信運營商能夠利用自有數(shù)據(jù)訓練 AI ....
基于NVIDIA GPU加速端點使用千問3.5 VLM開發(fā)原生多模態(tài)智能體
阿里巴巴推出了全新開源 千問3.5 系列,專為構建原生多模態(tài)智能體而設計。該系列的首個模型是一款總參....
NVIDIA攜手全球電信運營商共同推動AI原生6G創(chuàng)新
包括 Booz Allen、英國電信集團、思科、德國電信、愛立信、MITRE、諾基亞、ODC、SK ....
NVIDIA Alpamayo 1模型在Hugging Face平臺下載量已突破10萬次
NVIDIA Alpamayo 1 在 Hugging Face 的下載量已突破 10 萬次,且仍在....
NVIDIA Blackwell平臺助力企業(yè)實現(xiàn)token成本的大幅降低
一次醫(yī)療領域的診斷洞察、一次互動游戲中角色的對話、一次來自客服代理的自主解決方案——這些由 AI 驅....
利用NVIDIA Nemotron開放模型構建智能文檔處理系統(tǒng)
基于 NVIDIA Nemotron 開放模型的 AI 驅動文檔智能,增強科學研究、金融和法律等領域....
借助NVIDIA CUDA Tile IR后端推進OpenAI Triton的GPU編程
NVIDIA CUDA Tile 是基于 GPU 的編程模型,其設計目標是為 NVIDIA Tens....
NVIDIA全新開放物理AI模型和框架加速人形機器人開發(fā)
本文是洞悉 Omniverse 系列文章?!岸聪?Omniverse”重點介紹開發(fā)者、3D 從業(yè)者與....
NVIDIA最新報告揭示AI如何重塑供應鏈與消費者體驗
第三份年度 NVIDIA 零售和消費品行業(yè) AI 發(fā)展現(xiàn)狀及趨勢調研顯示,九成零售商計劃在 2026....
梅賽德斯奔馳推出基于NVIDIA DRIVE AV軟件的全新S級車型
梅賽德斯-奔馳在其 140 周年之際,推出專為 AI 時代打造的全新 S 級車型。它將汽車安全與 N....
NVIDIA DRIVE AV軟件平臺與Halos架構助力梅賽德斯奔馳CLA車型獲得最高安全評分
NVIDIA DRIVE AV 軟件平臺與 NVIDIA Halos 架構助力 CLA 車型獲得最高....

NVIDIA Cosmos世界基礎模型如何塑造機器人未來
在這一演進過程中,世界模型逐漸成為連接高層智能與底層執(zhí)行的關鍵基礎設施。通過對環(huán)境狀態(tài)及其時間演化進....

海洋生物實驗室利用AI和虛擬現(xiàn)實探索人類記憶
位于馬薩諸塞州的實驗室正在利用 NVIDIA RTX GPU、HP Z 工作站和虛擬現(xiàn)實技術研究人類....
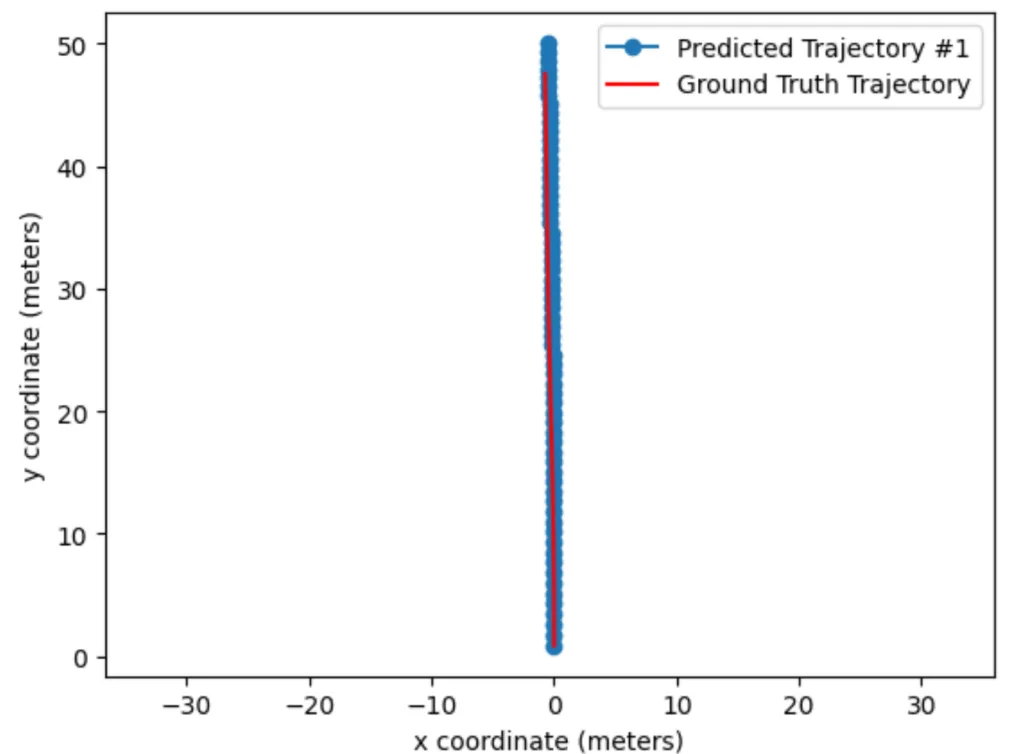
基于NVIDIA VLA模型打造通用人形機器人能力
要讓人形機器人真正有用,它們需要具備認知能力和移動操作能力,涵蓋感知、規(guī)劃以及在動態(tài)環(huán)境中的全身控制....
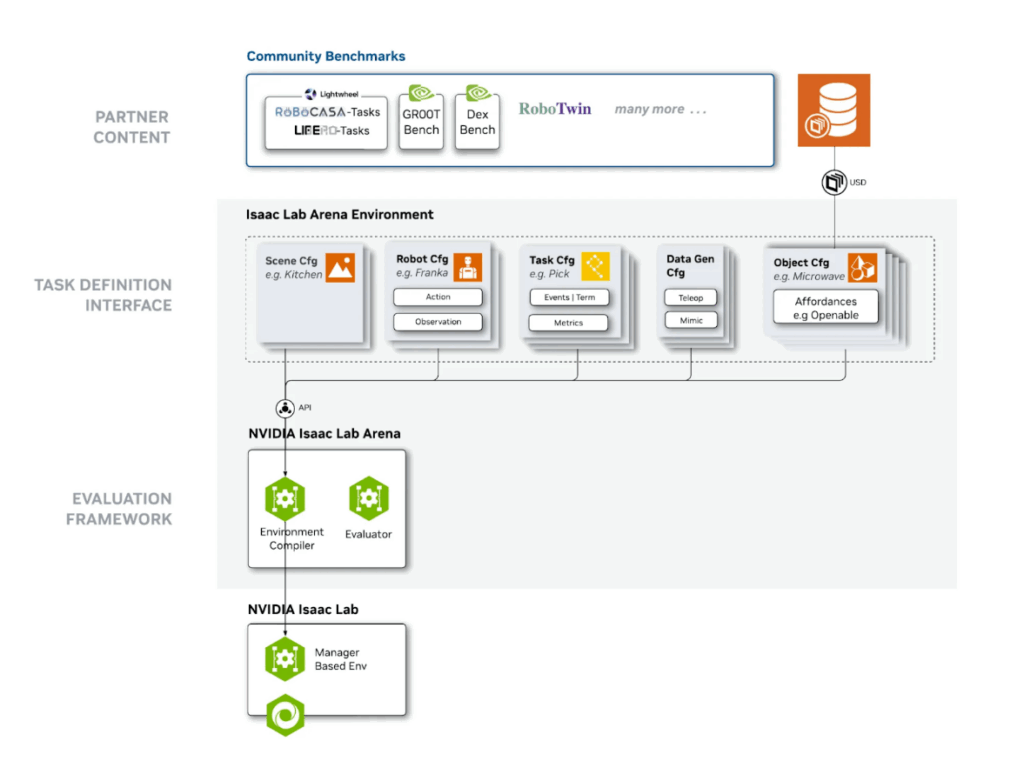
使用NVIDIA Isaac Lab-Arena簡化通用機器人策略的仿真評估
通用機器人策略需要能夠處理多種任務,適應不同形態(tài)的機器人,并在多樣化的環(huán)境中運行。因此,仿真評估過程....
NVIDIA DGX SuperPOD為Rubin平臺橫向擴展提供藍圖
NVIDIA DGX Rubin 系統(tǒng)整合了 NVIDIA 在計算、網(wǎng)絡和軟件領域的最新突破,將推理....
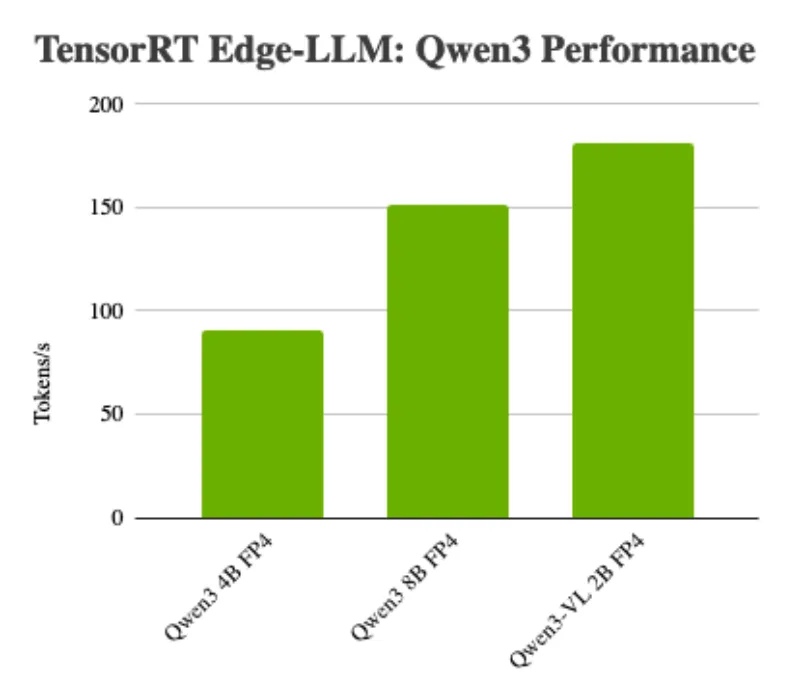
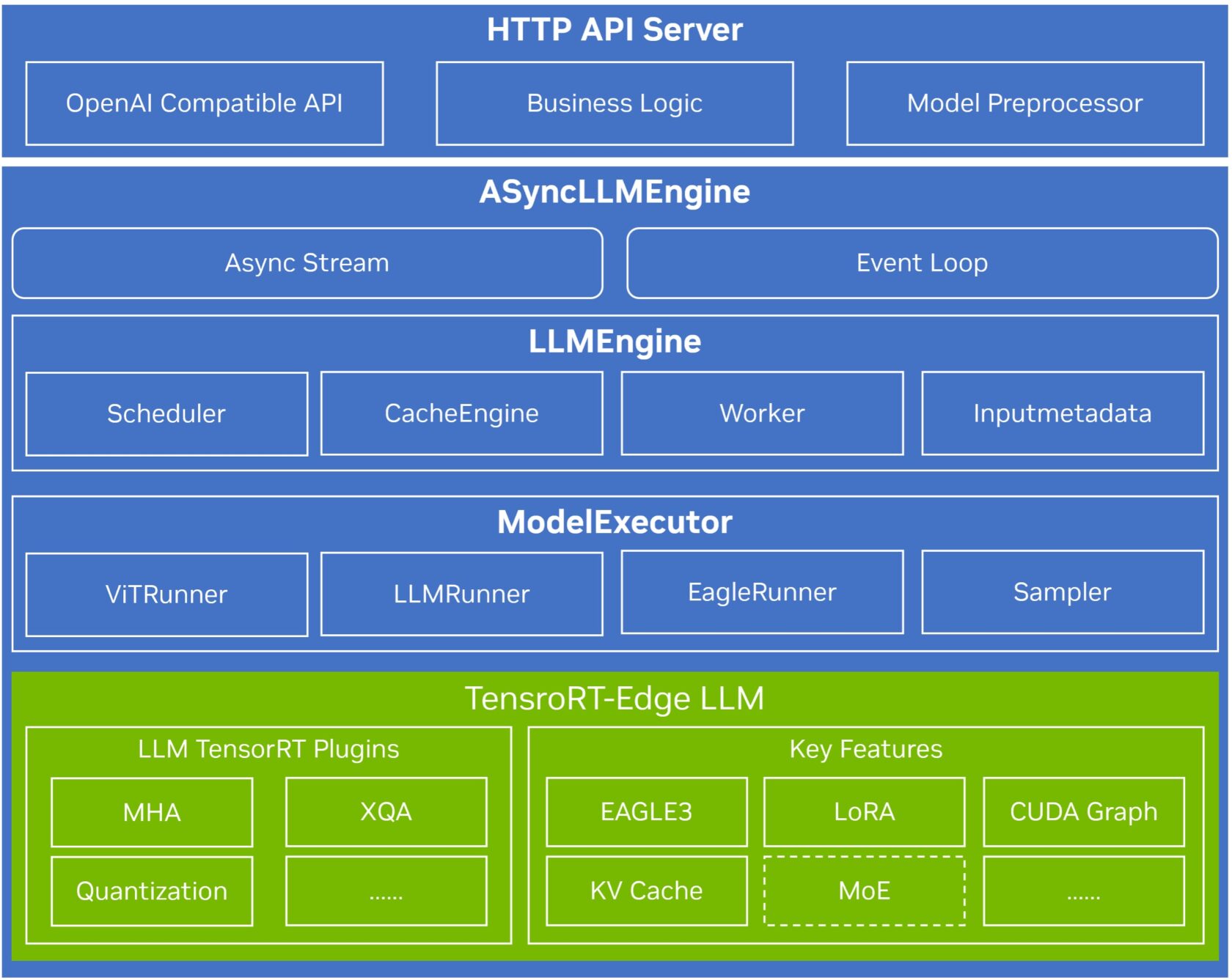
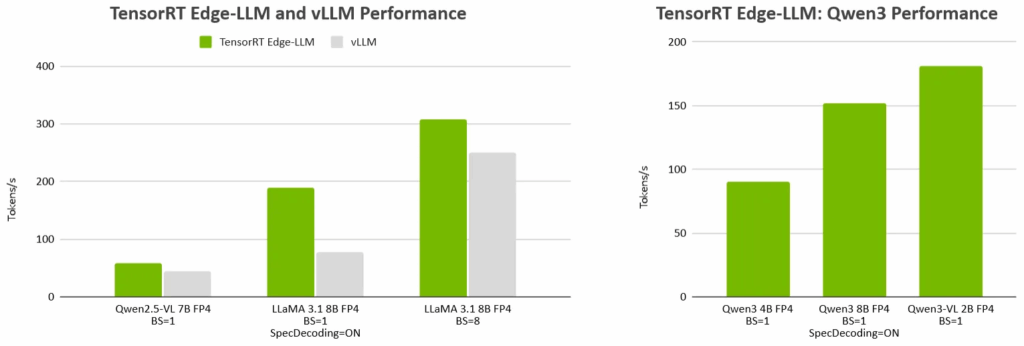
NVIDIA TensorRT Edge-LLM在汽車與機器人行業(yè)的落地應用
大語言模型(LLM)與多模態(tài)推理系統(tǒng)正迅速突破數(shù)據(jù)中心的局限。越來越多的汽車與機器人領域的開發(fā)者希望....
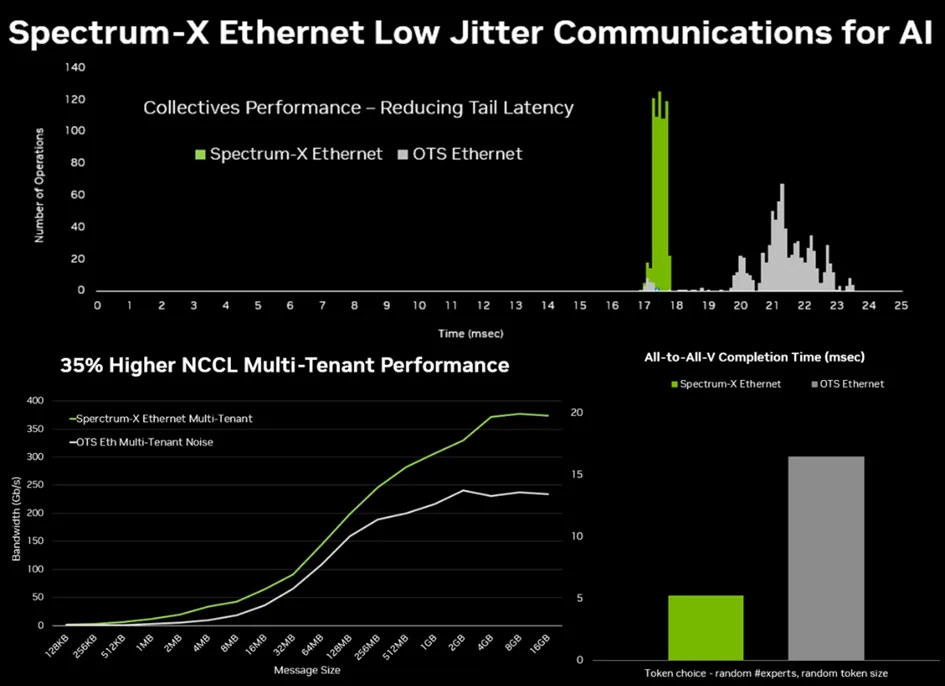
NVIDIA Spectrum-X以太網(wǎng)硅光技術助力AI工廠網(wǎng)絡創(chuàng)新
NVIDIA 將率先為 AI 工廠引入采用光電一體封裝 (CPO) 的優(yōu)化以太網(wǎng)網(wǎng)絡,通過 NVI....
全新軟件與模型優(yōu)化為NVIDIA DGX Spark注入強大動力
自發(fā)布以來,NVIDIA 通過持續(xù)的軟件優(yōu)化以及與軟件合作伙伴和開源社區(qū)的緊密協(xié)作,不斷提升基于 G....
NVIDIA在CES 2026宣布擴展DRIVE Hyperion全球生態(tài)系統(tǒng)
領先的交通運輸和技術合作伙伴正基于 NVIDIA 無人駕駛出租車就緒型 L4 級平臺,以 NVIDI....
多家領先軟件平臺現(xiàn)已與NVIDIA企業(yè)AI工廠驗證設計相集成
AI 正在推動各行各業(yè)取得突破性進展,幫助企業(yè)以更智能和更快的速度運營。隨著 AI 工廠規(guī)模的擴大,....
全新梅賽德斯奔馳CLA車型引入NVIDIA DRIVE AV軟件
NVIDIA 正在推動開啟 AI 定義的駕駛新時代,其搭載增強型 L2 級點到點駕駛輔助功能的 NV....
NVIDIA DGX Spark桌面級AI超級計算機助力開發(fā)者構建AI模型
開源 AI 正在加速各行各業(yè)的創(chuàng)新,NVIDIA DGX Spark 將幫助開發(fā)者將創(chuàng)新轉化為影響力....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)