PRFOBUS接頭及終端電阻
PROFIBUS 接線 PRFOBUS 接頭及終端電阻 插頭用于連接ROFIBUS電纜和PROFIB....
STRUC:定義結(jié)構(gòu)類型
部件: 組件的名稱。在結(jié)構(gòu)類型之內(nèi)只允許進(jìn)行一次。只在欄擁有 CHAR 類型且是一維時,才允許將其....
創(chuàng)建WorkVisual項目
從“目錄”窗口中選擇選項選項卡并打開 VW_Basic。對于所有標(biāo)準(zhǔn)機器人 VW_Basic 和 S....
螺紋涂膠在涂膠過程中有斷膠的想象
螺旋膠槍是由一個氣動開關(guān)膠槍和前面的轉(zhuǎn)閥兩部分組成,這種膠槍適合涂膠條和螺旋膠這兩種應(yīng)用,膠量的大小....
S7-1200 MODBUS TCP通信多請求處理的方法介紹
方法一:如果 TCP 連接充裕,可以建立多個不同的連接發(fā)送請求,即每個請求使用一個獨立的連接,調(diào)用獨....
MODBUS TCP通信功能的使用概述
Modbus TCP是標(biāo)準(zhǔn)的網(wǎng)絡(luò)通信協(xié)議,通過CPU上PN接口進(jìn)行TCP/IP通信,不需要額外的通信....
如何訪問1500S OPC UA服務(wù)器系列
第1步:登錄1515SP PC2 Windows系統(tǒng),進(jìn)入“控制面板->網(wǎng)絡(luò)和 Internet -....
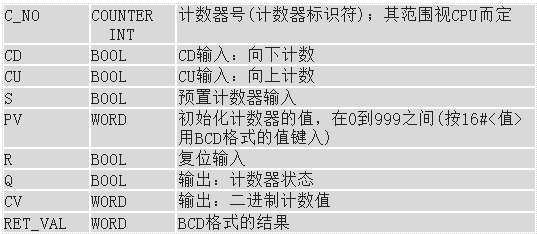
使用分配參數(shù)并加計數(shù)指令遞增計數(shù)器值
可使用“分配參數(shù)并加計數(shù)”指令遞增計數(shù)器值。當(dāng) CU 參數(shù)的信號狀態(tài)從“0”變?yōu)椤?”(信號上升沿)....
SCL--CASE指令如何實現(xiàn)順控功能
一般通過復(fù)雜指令完成位、錯誤位等作為跳轉(zhuǎn)條件。如果是定時器,也可以通過判斷時間是否到達(dá)作為跳轉(zhuǎn)條件。
SCL:CPU內(nèi)存區(qū)域的絕對存取
絕對標(biāo)識符指示CPU中的內(nèi)存區(qū)域。通過指定地址標(biāo)識符(此處為IB)后面跟一個地址(此處為10)來指定....
螺旋膠噴涂之膠槍結(jié)構(gòu)分析
漩渦噴槍材料用量調(diào)節(jié)通過調(diào)節(jié)閥進(jìn)行, 調(diào)節(jié)閥由閥針和閥套組成。驅(qū)動器電機驅(qū)動 閥針旋轉(zhuǎn),驅(qū)動器電機通....
如何創(chuàng)建WorkVisual項目
創(chuàng)建 WorkVisual 項目 -打開 WorkVisual 項目(始終使用機器人控制器中的項目)....
函數(shù)部分定義的形式輸入
調(diào)用之后,函數(shù)的結(jié)果可用作為返回值或作為輸出和輸入/輸出參數(shù)(實際參數(shù))。
S7-1200如何通過PROFIBUS DP對從站進(jìn)行一致性數(shù)據(jù)讀寫
CPU 為所有基本數(shù)據(jù)類型(如Word 或 DWord)和所有系統(tǒng)定義的結(jié)構(gòu)(例如 IEC_TIME....
如何通過S7-1200與第三方設(shè)備實現(xiàn)自由口通信
首先需要選擇“Create new project”選項,然后在“Project name:”里輸入....
博途W(wǎng)INCC-創(chuàng)建和組態(tài)圖形對象
特別是以后在帶有 HMI 畫面語言選擇的項目中工作時,可以使用該功能。 根據(jù)所選擇的語言,翻譯文....
S7-400集成PN口作為PROFINET IO控制器
獲取到IO設(shè)備的GSD文件后,打開TIA STEP7 Professional V16,點擊菜單欄“....
S1200對DP從站一致性數(shù)據(jù)讀寫
CPU 為所有基本數(shù)據(jù)類型(如Word 或 DWord)和所有系統(tǒng)定義的結(jié)構(gòu)(例如 IEC_TIME....
配置PROFINET IO設(shè)備
在配置PROFINET IO控制器之前,需要先配置PROFINET IO設(shè)備。本文使用S7-400集....
通過FB126診斷PROFINET IO系統(tǒng)
16K用于表示FC,F(xiàn)B,OB的機器代碼指令的大小。打開>16K項目中的FB126的屬性,在Gene....
S7-1200 MODBUS TCP通信多請求處理
方法一:如果 TCP 連接充裕,可以建立多個不同的連接發(fā)送請求,即每個請求使用一個獨立的連接,調(diào)用獨....
WinCC flexible測試項目
您已經(jīng)創(chuàng)建了第一個項目:在結(jié)束組態(tài)工作之前,可以通過移植一致性檢查函數(shù)和 WinCC 提供的模擬器來....
KUKS -ANOUT:循環(huán)說明模擬輸出端
在聲明部分給該模擬輸出端分配一個任意的名稱,在該情況下為 GLUE。粘結(jié)劑量取決于當(dāng)前的軌跡速度 (....
S7-1200F CPU和S7-1500F CPU實現(xiàn)安全相關(guān)控制器與控制器通訊的配置例程
通過PN/PN Coupler 實現(xiàn)控制器和控制器的F-CPU之間的安全相關(guān)通信,使用F應(yīng)用程序塊S....
結(jié)構(gòu)數(shù)據(jù)類型(Struct)及應(yīng)用案例
Struct數(shù)據(jù)類型使用非常靈活,隨時可以使用,但是相對于PLC數(shù)據(jù)類型 (UDT) 有以下缺點,所....
WinCC flexible測試移植項目
模擬功能能夠找出邏輯組態(tài)錯誤,例如不正確的限制值。 下列章節(jié)說明如何模擬填充量指示器和用于閥狀態(tài)的報....
KUKA 8.2系統(tǒng)遠(yuǎn)程連接步驟介紹
KUKA 8.2系統(tǒng)遠(yuǎn)程連接步驟介紹,實現(xiàn)遠(yuǎn)程訪問需要在KLIconfig.xml文件里進(jìn)行更改設(shè)置....
KUKA-C4機器人導(dǎo)出/導(dǎo)入長文本
從長文本導(dǎo)出中生成的文件,已自動具有相應(yīng)結(jié)構(gòu),確保其可被重新導(dǎo)入。如果應(yīng)手動將名稱寫入一個文件,則建....
機器人控制系統(tǒng)向 PLC 報告可能出現(xiàn)的錯誤
Synchron (同步):請等待,直到可能已啟動的后臺流程已結(jié)束,然后鎖閉后臺流程。然后,固定焊鉗....
電伺服焊鉗的擺臂銑刀的SG_Background控制
通過后臺命令可以使固定焊鉗進(jìn)行異步運動。此時機器人軸可獨立于焊鉗進(jìn)行另外的運動。不僅在修磨時可進(jìn)行異....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)