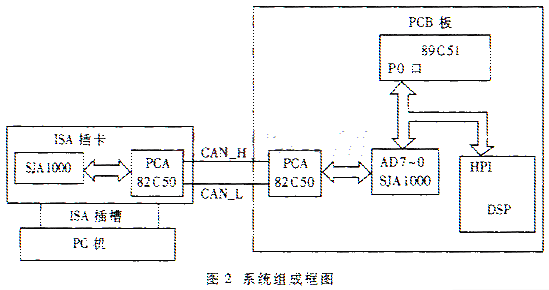
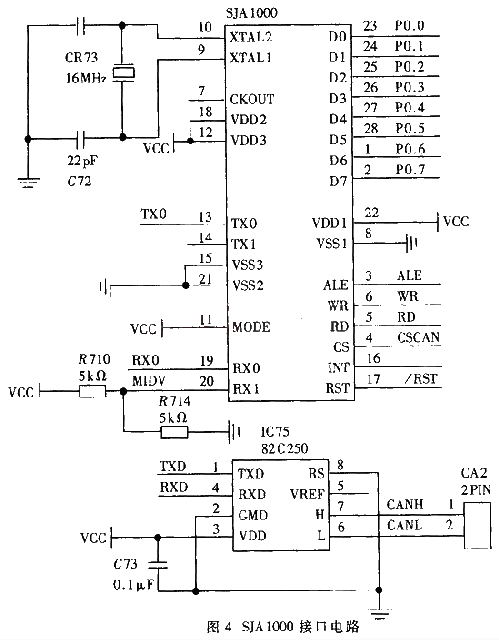
控制器。與SJA1000配套使用的CAN總線驅(qū)動器是PCA82C250����,它是PHILIPS推出的CAN控制器和物理總線接口芯片,可提供對總線的差分發(fā)送和接收��。
2019-01-09 08:23:00 7026
7026 
摘要:討論了CAN總線控制器與DSP之間的接口����,介紹了流行的CAN控制器芯片SJA1000和TMS320系列DSP芯片的接口時序,并給出了它們的接口方法和電路��。關(guān)鍵詞:CAN控制器 DSP 時序
2018-12-03 15:22:37
CAN通訊設(shè)計(jì)DSP/MCU的CAN接口是指芯片外設(shè)中的CAN總線控制器�,其輸出電平為TTL規(guī)格,如果直接將兩塊芯片的CANRX���、CANTX引腳連接����,無法實(shí)現(xiàn)CAN通訊。SAJ1000
2021-08-20 08:07:21
大家有做過CAN總線的嗎��?就是利用arm或dsp實(shí)現(xiàn)can協(xié)議
2012-03-07 16:02:31
進(jìn)行接口轉(zhuǎn)換�。如圖1所示。應(yīng)用TMS320LF2407內(nèi)嵌的CAN模塊和總線接口芯片PCA82C250�,實(shí)現(xiàn)了TMS320LF2407與CAN總線的串行通信。 2.TMS320LF2407
2019-06-14 05:00:10
過程中更加穩(wěn)定���、高速、可靠��。本文旨在探討采用DSP與相應(yīng)接口芯片BU-61864�����,設(shè)計(jì)相關(guān)電路來實(shí)現(xiàn)機(jī)載火控?cái)?shù)據(jù)的采集�����。1 1553B數(shù)據(jù)總線MIL_STD_1553B是軍工定義的數(shù)字時分制命令/響應(yīng)式多路
2019-06-13 05:00:04
下完成�。2.1 CAN總線驅(qū)動2.1.1 初始化CAN模塊使用前必須初始化���,初始化需要完成的主要工作有:引腳配置;郵箱配置;波特率配置;中段功能設(shè)置。限于篇幅���,初始化程序從略��。2.1.2 CAN發(fā)送本文采用
2019-06-21 05:00:03
�����。philips公司的高速總線驅(qū)動器82c50���,它采用雙線差分驅(qū)動,抗干擾強(qiáng)�����。can總線驅(qū)動器與單片機(jī)接線如圖1所示�,為實(shí)現(xiàn)總線上節(jié)點(diǎn)之間的電氣隔離 can驅(qū)動器通過高速光藕6n137與pic18f458進(jìn)行
2019-06-11 05:00:07
據(jù)量的軟件變量進(jìn)行實(shí)時監(jiān)控和記錄,這就需要一個上行傳輸給上位機(jī)的高速通信接口���,數(shù)據(jù)上行的數(shù)據(jù)率需要大于6 MB/s���。同時這個通信接口還需具有雙向特性�,通過數(shù)據(jù)下行可實(shí)現(xiàn)在線程序加載與燒寫���。這樣的通信接口
2019-05-31 05:00:04
運(yùn)營商��、設(shè)備商對低硬件成本的要求����,需要實(shí)現(xiàn)一種平滑的協(xié)議標(biāo)準(zhǔn)軟升級方案���,即不改變硬件平臺就可實(shí)現(xiàn)協(xié)議標(biāo)準(zhǔn)的升級.TI公司推出的3內(nèi)核DSP芯片TCl6488以其強(qiáng)大的數(shù)據(jù)處理能力���,同時支持多種代碼加載
2019-05-24 05:00:34
c51實(shí)現(xiàn)can總線需要外接那些芯片
2023-10-08 11:09:36
為什么采用FPGA去加載TigerSHARC DSP����?如何去設(shè)計(jì)加載狀態(tài)機(jī)?加載狀態(tài)機(jī)有哪幾個典型的加載過程�����?
2021-04-28 06:30:11
國際標(biāo)準(zhǔn)化組織認(rèn)可���,技術(shù)比較成熟�,控制的芯片已經(jīng)商品化,性價比高����,特別適用于分布式測控系統(tǒng)之間的數(shù)通訊。CAN 總線插卡可以任意插在 PC AT XT 兼容機(jī)上����,方便地構(gòu)成分布式監(jiān)控系統(tǒng)���。因此��,用 FPGA 實(shí)現(xiàn) CAN 總線通信控制器具有非常重要的應(yīng)用價值�。
2018-12-13 14:26:31
摘要:介紹了PCI總線控制芯片PCI2040的功能及內(nèi)部結(jié)構(gòu)�,分析了基于PCI總線的雙DSP通信的硬件結(jié)構(gòu)及實(shí)現(xiàn)方法,并描述了利用Windows2000 DDK開發(fā)WDM設(shè)備驅(qū)動程序的方法及PCI雙
2019-09-24 22:18:02
如題,君正全志芯片沒有CAN總線接口,大佬們是如何實(shí)現(xiàn)CAN通信的?
2020-05-06 09:42:33
轉(zhuǎn)換器進(jìn)行接口轉(zhuǎn)換��。如圖1所示���。應(yīng)用TMS320LF2407內(nèi)嵌的CAN模塊和總線接口芯片PCA82C250,實(shí)現(xiàn)了TMS320LF2407與CAN總線的串行通信����。2.TMS320LF2407
2018-12-10 10:19:26
(BootLoader)DSP系統(tǒng)的自舉加載目的是使系統(tǒng)上電后程序代碼能從外部存儲介質(zhì)引導(dǎo)裝載到DSP內(nèi)部或外部程序存儲器中脫機(jī)運(yùn)行。自舉加載的實(shí)現(xiàn)方式常用的有外部并行自舉加載和HPI自舉加載兩種���。由于主機(jī)可以通過
2018-12-17 11:29:06
畢設(shè)題目是基于dsp的受控子系統(tǒng)設(shè)計(jì)�����,沒思路啊�,求大神指點(diǎn)一二{:16:}
2014-03-03 21:16:35
基于DSP的高低速CAN總線汽車控制系統(tǒng)設(shè)計(jì)摘 要 采用TI公司內(nèi)嵌CAN 2.0B模塊的數(shù)字信號處理器TMS320LF2407A作為汽車計(jì)算機(jī)控制系統(tǒng)中的主控制器并兼作網(wǎng)關(guān)��,構(gòu)建高低速CAN總線
2009-10-06 14:57:04
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機(jī)固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實(shí)現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
如何采用DSP芯片實(shí)現(xiàn)圖像的模式識別��?
2021-04-30 06:25:54
請問一下有沒有采用EEPROM對大容量FPGA芯片數(shù)據(jù)實(shí)現(xiàn)串行加載的實(shí)際方案�?
2021-04-08 06:01:39
如何去采用PCI9030芯片實(shí)現(xiàn)從ISA總線到PCI總線的轉(zhuǎn)接卡的設(shè)計(jì)���?有哪些方法����?其過程是怎樣的���?
2021-07-01 08:00:36
怎么實(shí)現(xiàn)基于DSP的電動汽車CAN總線通訊技術(shù)設(shè)計(jì)�����?
2021-05-18 06:34:14
怎么實(shí)現(xiàn)基于μC/OS-II的CAN總線驅(qū)動程序的設(shè)計(jì)���?
2021-06-08 06:51:07
針對于TMS320LF2407A這款DSP芯片,請問是否有解決方案可以通過CAN總線對DSP芯片固件程序進(jìn)行燒錄,謝謝!
2018-08-19 07:52:36
CAN總線芯片
好東西哦��。網(wǎng)上搜集,希望對你有用��。
2006-03-25 16:20:33 139
139 根據(jù)控制局域網(wǎng)絡(luò)(CAN)的特點(diǎn)及應(yīng)用要求�,提出一種新的動態(tài)調(diào)度協(xié)議(DSP),通過動態(tài)選擇時間間隙調(diào)度信息���,同時考慮實(shí)時數(shù)據(jù)的重傳機(jī)制��,并在此基礎(chǔ)上介紹基于CAN 總線的實(shí)
2009-03-30 10:24:5026 基于DSP和CAN總線的機(jī)車故障數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
2009-05-08 17:19:0116 研究一種基于DSP 與CAN 總線的測速和遠(yuǎn)程傳送一體化技術(shù)�。根據(jù)TMS320LF2407 芯片內(nèi)帶有捕獲單元的事件管理器和CAN 控制器模塊的特點(diǎn)�,探討配置方法、給出設(shè)計(jì)實(shí)例��,簡潔實(shí)現(xiàn)測速和
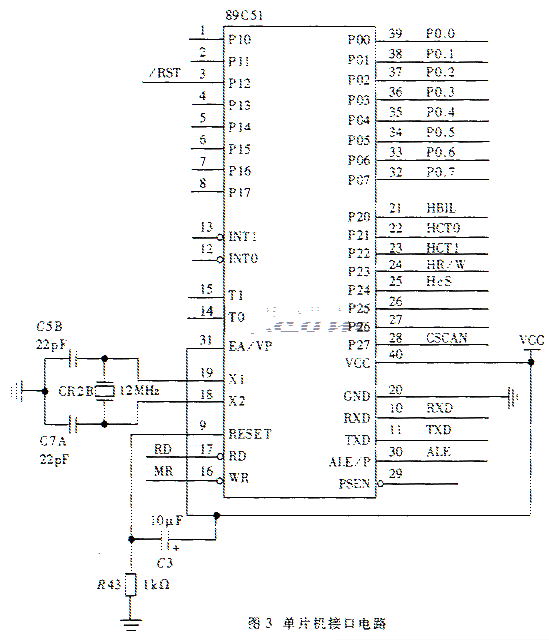
2009-05-18 14:24:3817 CAN 總線作為一種現(xiàn)場總線�,應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節(jié)點(diǎn)設(shè)計(jì)方法�����,并對軟硬件進(jìn)行了相應(yīng)的說明���。關(guān)鍵詞:CAN 總線����,SJA1000�����,單片機(jī)CAN(C
2009-05-25 13:26:1261 本文主要介紹了基于多DSP 的CAN 總線通信電機(jī)控制系統(tǒng)的設(shè)計(jì)�,利用PC 機(jī)作為監(jiān)控主機(jī),采用CAN 總線接口卡實(shí)現(xiàn)CAN 協(xié)議的物理層和數(shù)據(jù)鏈路層���,最終實(shí)現(xiàn)對各節(jié)點(diǎn)電機(jī)的監(jiān)控和管理
2009-05-30 14:56:4027 本文介紹了一種基于CAN總線的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案�。該方案使用CAN卡和DSP中的CAN模塊作為上下位機(jī)通信接口����,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口�����,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 陀螺是一種應(yīng)用廣泛的慣性器件���,而陀螺動態(tài)測試系統(tǒng)是重要的研究課題�����,首先提出了采用CAN總線作為數(shù)據(jù)通訊方式��,DSP作為各智能節(jié)點(diǎn)的主控制器來構(gòu)建陀螺動態(tài)測試系統(tǒng)����,然后
2009-07-10 16:12:2913 本設(shè)計(jì)為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅(qū)動,以實(shí)現(xiàn)CAN 總線上設(shè)備間的通信��。分析了linux 下標(biāo)準(zhǔn)設(shè)備驅(qū)動機(jī)制和CAN 總線通信模型��,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設(shè)計(jì)
2009-08-04 08:33:4830 隨著計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)和現(xiàn)場總線技術(shù)的發(fā)展���,工業(yè)自動化系統(tǒng)將逐步被現(xiàn)場總線控制系統(tǒng)FCS (Field-bus Control System)所取代�。本文給出了一種基于CAN 現(xiàn)場總線技術(shù)��、以DSP TMS320LF2407A
2009-08-21 09:12:1874 本文以S3C44B0X 為微處理器�,通過其SPI 接口,采用MCP2510 CAN 控制器擴(kuò)展CAN 總線�����,文章在分析Linux 設(shè)備驅(qū)動程序工作原理和結(jié)構(gòu)的基礎(chǔ)上�����,重點(diǎn)論述CAN 設(shè)備在uClinux 下驅(qū)動程序的設(shè)計(jì)方
2009-08-25 09:09:3722 介紹了CAN 總線在航天領(lǐng)域的應(yīng)用狀況����,在對CAN 總線技術(shù)和DSP 芯片功能研究的基礎(chǔ)上�����,設(shè)計(jì)了基于CAN 總線和DSP 的雙層數(shù)據(jù)采集系統(tǒng),本數(shù)據(jù)采集系統(tǒng)對于CAN 總線技術(shù)在航天領(lǐng)域
2009-09-26 09:11:3923 基于CAN 總線的風(fēng)機(jī)監(jiān)控系統(tǒng)以DSP 芯片作為核心控制部件�����,配合各種傳感器和外部電路����,自動監(jiān)控煤礦井下通風(fēng)的各項(xiàng)指標(biāo),實(shí)現(xiàn)風(fēng)機(jī)開機(jī)����、停機(jī)、風(fēng)量調(diào)節(jié)��、電機(jī)檢測和綜合保護(hù)的
2010-01-07 12:03:2314 基于LabVIEW中DSP目標(biāo)文件加載的實(shí)現(xiàn)
數(shù)據(jù)采集卡(DAQ)的存儲空間是系統(tǒng)設(shè)計(jì)的一個重要的硬件資源,對采樣速率����、實(shí)時處理性與系統(tǒng)功能都有很大的影響。在虛擬頻譜儀設(shè)計(jì)
2009-06-16 11:21:051401 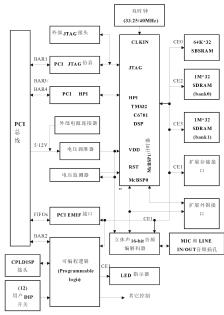
SHARC DSP與SJA1000的CAN總線接口設(shè)計(jì)
本文討論了DSP與CAN控制器SJA1000的總線接口的差別�,提出了SJA1000和SHARC系列DSP接口設(shè)計(jì)的簡單方法和通用方法�����。測試
2009-09-27 16:10:551576 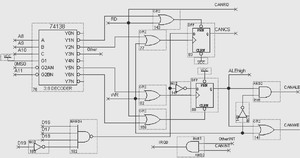
基于DSP的CAN總線接口設(shè)計(jì)
1. CAN總線簡介
控制器局部網(wǎng)絡(luò)(CAN ControllerAreaNetwork)是德國Bosch公司從20世紀(jì)80年代初為解決現(xiàn)代汽車中眾多
2009-10-04 09:41:575067 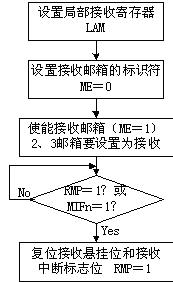
基于CAN總線的變頻設(shè)備遠(yuǎn)程監(jiān)控系統(tǒng)的實(shí)現(xiàn)
CAN總線介紹:
CAN總線有以下特點(diǎn):
2009-10-10 08:56:30925 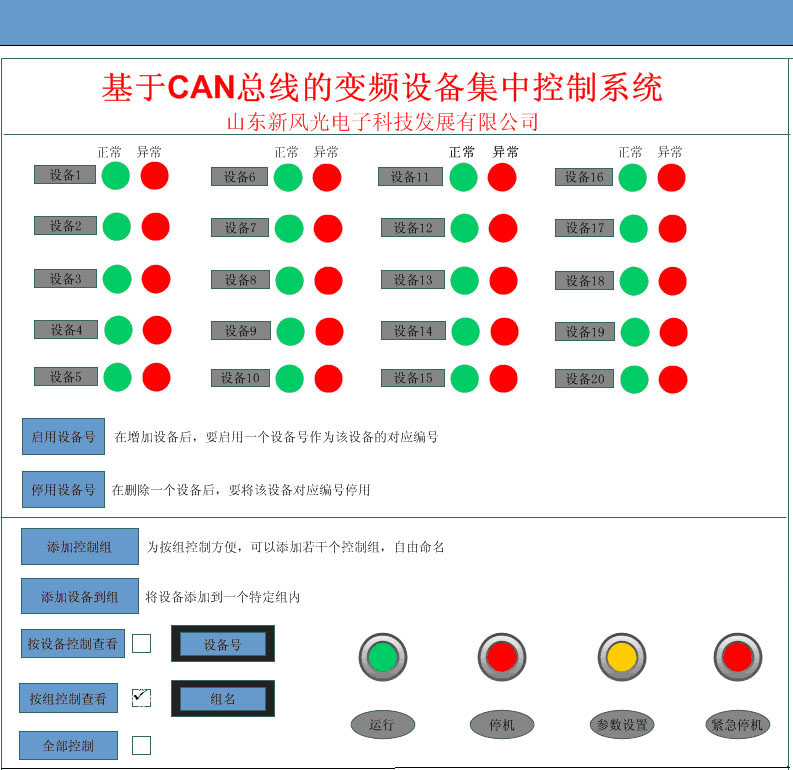
PC機(jī)并口與現(xiàn)場總線CAN通訊的實(shí)現(xiàn)
以PC機(jī)并口與CAN通訊為例���,通過電路與程序實(shí)例具體介紹了通過并口EPP協(xié)議與CAN轉(zhuǎn)換的實(shí)現(xiàn)?��! £P(guān)鍵詞:現(xiàn)場
2009-10-16 17:53:322097 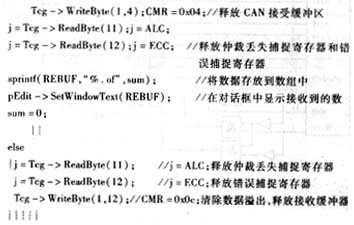
基于PCI總線的CAN卡的設(shè)計(jì)與實(shí)現(xiàn)
現(xiàn)場總線CAN(Controller Area Network控制器局域網(wǎng)絡(luò))以其高性能�、高可靠性及獨(dú)特的設(shè)計(jì),越來越受到人們的重視和青睞,
2009-10-25 10:54:581137 
CAN總線通信硬件原理圖(采用TJA1050T CAN總線驅(qū)動器)
F040中內(nèi)置CAN總線協(xié)議控制器����,只要外接總線驅(qū)動芯片和適當(dāng)?shù)目垢蓴_電路就可以很方便地建立一
2009-11-13 12:18:1435131 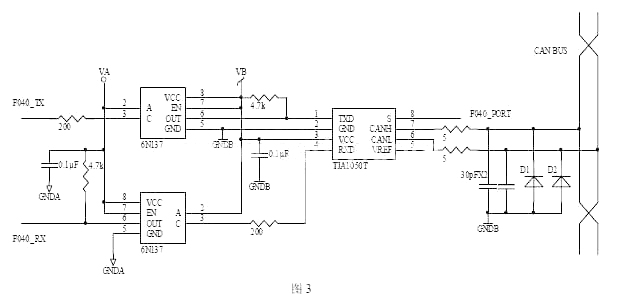
TMS320C6701 DSP自動加載研究
0 引 言
在許多DSP應(yīng)用系統(tǒng)中,都需要DSP芯片能夠在加電后自動從外部設(shè)備加載程序�,也就是引導(dǎo)(Boot-load)。TI公司的TMS320C6000系列芯
2009-11-17 09:46:073047 
基于CAN總線和DSP的雙層數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
1 引言
CAN(Controller Area Network)即控制器區(qū)域網(wǎng)��,CAN總線是由德國BOSCH公司為實(shí)現(xiàn)汽車測量和
2009-11-25 11:00:371067 基于DSP的電動汽車CAN總線通訊技術(shù)設(shè)計(jì)
德國Bosch公司為了解決現(xiàn)代車輛中眾多的控制和數(shù)據(jù)交換問題,開發(fā)出一種CAN(Controller AreaNetwork) 現(xiàn)場總線通訊結(jié)構(gòu). CAN
2009-12-23 10:51:431306 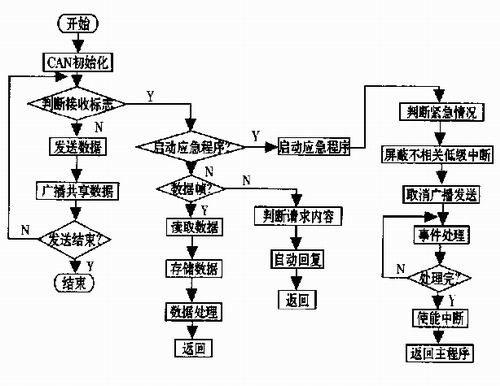
基于DSP的PCI總線CAN適配器設(shè)計(jì)
1 引 言
CAN總線是一種開放式�、數(shù)字化、多點(diǎn)通信的串行總線����,是一種具有較高性價比、能滿足分布式控制要求的現(xiàn)場總線,
2010-03-05 11:21:331981 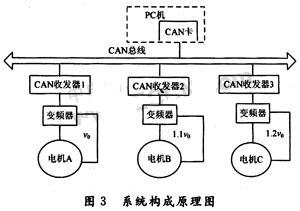
DSP芯片,什么是DSP芯片
DSP芯片�����,也稱數(shù)字信號處理器�,是一種具有特殊結(jié)構(gòu)的微處理器。DSP芯片的內(nèi)部采用程序和數(shù)據(jù)分開的哈佛結(jié)構(gòu)
2010-03-26 14:55:164070 DSP的CAN總線系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
摘要:介紹了基于DSP的CAN控制器的設(shè)計(jì)及應(yīng)用方法���,利用該方法可以在波特率高達(dá)lMb/s的條件下穩(wěn)定、可靠地傳輸數(shù)據(jù)��,而且延遲時間很少
2010-04-03 11:20:325268 
芯片的燒寫與自加載是一個DSP系統(tǒng)能夠順利運(yùn)行的基本條件�。在DSP加載技術(shù)方面已經(jīng)有大量文獻(xiàn)和工作成果,比較好地解決了DSP自加載方面的許多基本問題��。
2011-05-26 11:10:081413 
介紹了基于DSP 和CAN 現(xiàn)場總線的分布式新型變電站RTU 的設(shè)計(jì)方案�����。該RTU 分為通信主控模塊和信號測控模塊���, 介紹了這兩個模塊的設(shè)計(jì)方法及CPLD 技術(shù)在這兩個模塊設(shè)計(jì)中的應(yīng)用���。在設(shè)計(jì)
2011-09-16 11:09:142106 
介紹了基于以太網(wǎng)的加載方法, 包括網(wǎng)絡(luò)接口控制HPI接口控制,該技術(shù)靈活方便,可脫離仿真器實(shí)現(xiàn)遠(yuǎn)程���,大容量的程序代碼加載���,快速完成DSP系統(tǒng)的軟件更新
2013-09-23 17:22:5727 本文簡要介紹了嵌入式實(shí)時操作系統(tǒng)WinCE環(huán)境下驅(qū)動程序的設(shè)計(jì)原理和CAN總線技術(shù)并詳細(xì)分析了依托PC/104總線的CAN適配卡底層驅(qū)動程序的設(shè)計(jì)與實(shí)現(xiàn)���。
2016-03-29 14:25:183 can總線驅(qū)動芯片;低功耗�;電路設(shè)計(jì)簡單;傳送速度快
2016-05-16 11:56:0844 CAN總線的多對一程序����,通過多個STM32開發(fā)板驗(yàn)證,最終實(shí)現(xiàn)多對一數(shù)據(jù)包的發(fā)送接收�����。
2016-08-09 15:08:2720 CAN總線通信協(xié)議的分析和實(shí)現(xiàn) CAN總線通信協(xié)議以及其實(shí)現(xiàn)方法
2017-09-04 08:45:3340 基于PCI總線的DSP系統(tǒng)應(yīng)用程序的更新
2017-10-19 11:48:246 基于DSP_FPGA與CAN總線的跟蹤控制器設(shè)計(jì)
2017-10-21 08:52:075 當(dāng)前��,有一些微處理器將CAN控制器嵌入到系統(tǒng)之中�,但是仍有大量人們比較熟悉的微處理器并不帶有CAN控制器。采用微處理器和CAN控制器組合的設(shè)計(jì)成為必要�����,而且,CAN控制器具有完成CAN總線通信協(xié)議
2017-10-23 15:48:0713 芯片的燒寫與自加載是一個DSP系統(tǒng)能夠順利運(yùn)行的基本條件�����。在DSP加載技術(shù)方面已經(jīng)有大量文獻(xiàn)和工作成果���,比較好地解決了DSP自加載方面的許多基本問題���。而傳統(tǒng)的燒寫/加載方案在調(diào)試、更新程序時需要反復(fù)
2017-10-31 11:00:430 字電機(jī)伺服驅(qū)動系統(tǒng)���,使用CANopen通訊協(xié)議實(shí)現(xiàn)了CAN總線數(shù)字信號處理器(DSP)系統(tǒng)與上位機(jī)CAN卡之間的通訊,并通過測試實(shí)驗(yàn)驗(yàn)證了信息傳遞的可靠性�����,保證了全數(shù)字網(wǎng)絡(luò)化伺服驅(qū)動系統(tǒng)中對電機(jī)控制的快速性����、準(zhǔn)確性和實(shí)時性。 2 通訊系統(tǒng)實(shí)現(xiàn)的基本原理 2.1 LF240x系
2017-10-31 11:00:5818 芯片的燒寫與自加載是一個DSP系統(tǒng)能夠順利運(yùn)行的基本條件��。在DSP加載技術(shù)方面已經(jīng)有大量文獻(xiàn)和工作成果�,比較好地解決了DSP自加載方面的許多基本問題。而傳統(tǒng)的燒寫/加載方案在調(diào)試、更新程序時需要反復(fù)
2017-10-31 11:26:380 為了擴(kuò)展VME總線和CAN總線的應(yīng)用范圍�,充分利用兩種總線的不同傳輸特點(diǎn),采用了模塊設(shè)計(jì)方法�����,提出一種基于FPGA和MCU的總線轉(zhuǎn)換方案�。該方案給出了FPGA與上位VME總線部分的VME總線接口
2018-07-17 10:11:004234 
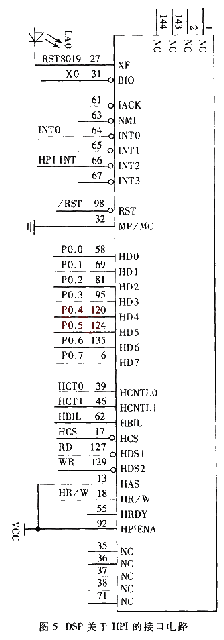
由于DSP 本身內(nèi)帶CAN 總線模塊,所以不需要專門的CAN 控制器����,DSP 本身不具有CAN 收發(fā)器,需要外接CAN 收發(fā)器82C250 �����,中間使用光電隔離器6N137. 如果距離很短�,可以不使用光電隔離器。 DSP與光電隔離器和CAN 收發(fā)器硬件連接圖如圖5 所示���。
2018-07-18 12:25:001603 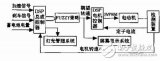
為了解決工業(yè)遠(yuǎn)程控制設(shè)備的軟件更新帶來的成本和效率問題�����,在研究了以TMS320C6670為核心的DSP系統(tǒng)的結(jié)構(gòu)和程序啟動的基礎(chǔ)上��,提出了基于以太網(wǎng)的DSP程序遠(yuǎn)程加載方法�。該方法主要基于BOOTP協(xié)議的廣播和以太網(wǎng)UDP協(xié)議實(shí)現(xiàn)。實(shí)踐表明����,該加載技術(shù)靈活可靠,為遠(yuǎn)程控制系統(tǒng)的調(diào)試和更新提供了便利���。
2018-02-06 16:16:081826 
TMS32 VC5506/C5507/C5509/C5509A數(shù)字信號處理器(DSP)的加載通過處理器通用串行總線(USB)外圍設(shè)備是標(biāo)準(zhǔn)的一部分��。在設(shè)備上提供引導(dǎo)加載程序�。本文件描述了程序將DSP
2018-04-25 10:49:318 CAN總線是一種開放式���、數(shù)字化���、多點(diǎn)通信的串行總線���,是一種具有較高性價比�、能滿足分布式控制要求的現(xiàn)場總線�����,在控制領(lǐng)域得到廣泛采用。CAN的速率可達(dá)到1 Mb/s/40 M��,最大傳輸距離可達(dá)10 km/5 kb/s�����。
2019-02-06 08:52:003932 
��;而CAN總線在電梯群控系統(tǒng)中卻體現(xiàn)出更多的優(yōu)勢:CAN總線通信與RS485通信相比抗干擾能力更好��;可連接較多的通信節(jié)點(diǎn)�����;通信速率更高�;實(shí)時性與穩(wěn)定性高,所以本文采用CAN總線來實(shí)現(xiàn)群控主機(jī)和各電梯之間的通信��。
2019-10-30 07:51:006878 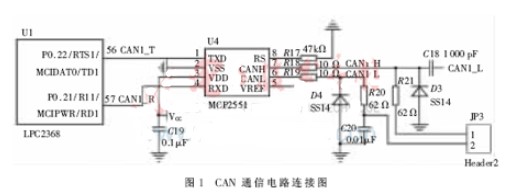
CAN總線用戶接口簡單���,編程方便����。網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)采用總線式結(jié)構(gòu)�����。這種網(wǎng)絡(luò)結(jié)構(gòu)簡單、成本低����,并且采用無源抽頭連接,系統(tǒng)可靠性高�。通過CAN總線連接各個網(wǎng)絡(luò)節(jié)點(diǎn),形成多主機(jī)控制器局域網(wǎng)(CAN)�。信息的傳輸采用CAN通信協(xié)議,通過CAN控制器來完成�。
2018-11-28 17:16:0319155 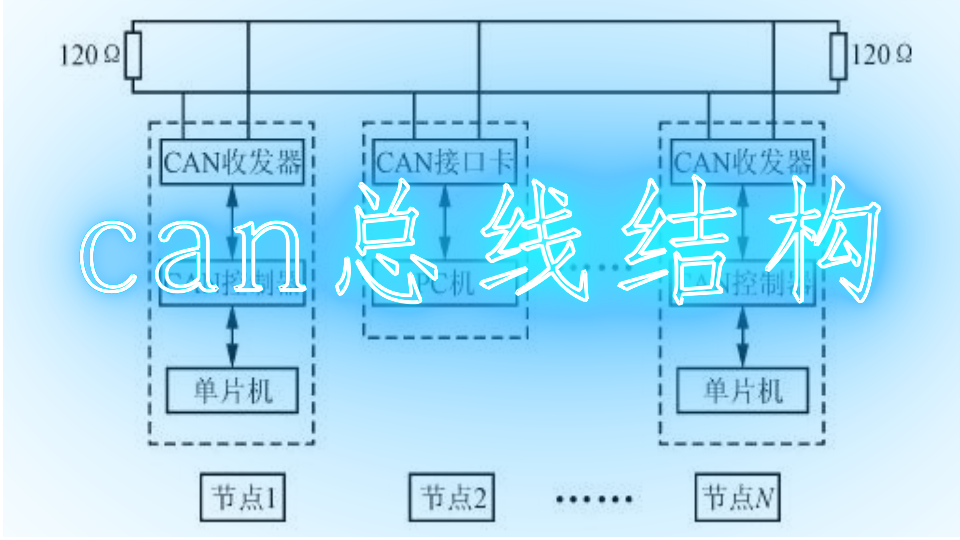
熱功率模擬系統(tǒng)用于測試整星熱平衡試驗(yàn)時模擬星上各設(shè)備熱量分布情況,以檢測整星的熱控系統(tǒng)性能�。本系統(tǒng)采用數(shù)字信號處理(DSP)組成單元處理系統(tǒng),采用控制器局部網(wǎng)(CAN)總線組成通信網(wǎng)絡(luò)�,通過計(jì)算機(jī)對每一路功率按照預(yù)先設(shè)定好的功率曲線進(jìn)行調(diào)控、巡檢�、記錄。
2019-02-25 11:46:168 相比�����,CAN總線的數(shù)據(jù)通信具有突出的可靠性���、實(shí)時性和靈活性,它在汽車領(lǐng)域上的應(yīng)用最為廣泛,世界上一些著名的汽車制造廠商�����,如BENZ(奔馳)����、BWM(寶馬)、Volkswagen(大眾)等都采用了CAN總線來實(shí)現(xiàn)汽車內(nèi)部控制系統(tǒng)與各檢測和執(zhí)行機(jī)構(gòu)間的數(shù)據(jù)通信�。目前,CAN總線的應(yīng)用范圍已不僅
2020-01-15 08:00:007 硬件電路的設(shè)計(jì)主要是CAN通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設(shè)計(jì)����。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議�����,而CAN總線收發(fā)器的主要功能是增大通信距離�����,提高系統(tǒng)的瞬間抗干擾能力����,保護(hù)總線�,降低射頻干擾(RFI)���,實(shí)現(xiàn)熱防護(hù)等����。
2020-03-13 10:45:508845 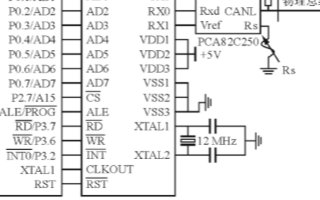
專用液晶顯示屏用來顯示轉(zhuǎn)速、機(jī)油壓力����、水溫、燃油消耗等���;PC機(jī)用來處理CAN總線上的數(shù)據(jù)并通過軟件顯示于顯示屏上���;PC-CAN接口卡完成PC機(jī)與CAN之間的通信;自行設(shè)計(jì)的ECU完成從各傳感器采集
2020-03-16 10:00:392844 
遠(yuǎn)程更新�、調(diào)試和自加載軟硬件系統(tǒng)。設(shè)計(jì)了硬件電路和網(wǎng)絡(luò)通信芯片驅(qū)動程序�,實(shí)現(xiàn)了DSP的TCP/IP協(xié)議的嵌入。誼方法靈活地運(yùn)用外存地址的重映射特性���,使DSP可選擇性地加載用戶程序�����,實(shí)現(xiàn)新程序的自加戴.
2021-03-02 17:11:3310 文章介紹了CAN總線通信協(xié)議和Motorola新一代嵌入式控制器DSP56F805內(nèi)置的用于實(shí)現(xiàn)CAN通信的MSCAN模塊��,并通過編程實(shí)例說明了MSCAN模塊的應(yīng)用方法���,最后介紹了研華公司生產(chǎn)的CAN總線通信卡PCL841的使用方法。
2021-03-15 16:24:2715 針對現(xiàn)場總線的實(shí)時性要求��,提種基于DSP芯片TMs320LF2407A的CAN總線通信技術(shù)方案�,設(shè)計(jì)了基于這種控制器的CAN網(wǎng)絡(luò)節(jié)點(diǎn)的硬件,而且利用T公司的CC4110軟件和聞亭公司
2021-03-22 17:17:549 簡單介紹了語音編解碼技術(shù)的應(yīng)用背景�,根據(jù)目前工程應(yīng)用需求,提出了設(shè)計(jì)思路詳細(xì)描述了采用DSP芯片實(shí)現(xiàn)語音編解碼技術(shù)��,開發(fā)過程中突破了多DSP共用總線和 FLASH動態(tài)加載關(guān)鍵技術(shù)�,包括HPI總線共用
2021-04-11 11:39:3818 CAN總線節(jié)點(diǎn)軟件的設(shè)計(jì)與實(shí)現(xiàn)說明。
2021-04-19 16:59:1020 采用USB和CAN總線的電力監(jiān)控?cái)?shù)據(jù)采集系統(tǒng)�����。
2021-04-20 09:43:0014 電機(jī)控制的DSP程序設(shè)計(jì)及CAN基礎(chǔ)知識免費(fèi)下載�。
2021-05-19 10:06:3244 可能只是整個系統(tǒng)的一部分。完成系統(tǒng)對接后,DSP分系統(tǒng)與整個系統(tǒng)配合工作�����,一旦出現(xiàn)問題����,就需要將DSP分系統(tǒng)與整個系統(tǒng)分離,露出JTAG端口后才能實(shí)現(xiàn)軟件的調(diào)試與加載���。
2021-05-31 15:17:0712 【科普】CAN總線介紹及FPGA實(shí)現(xiàn)方案簡介 這里我們先逆推一下CAN總線的一些特點(diǎn)���。 第一,CAN總線分層結(jié)構(gòu) 我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結(jié)構(gòu)�,而且參考OSI模型
2021-11-18 16:35:556764 
CAN通訊設(shè)計(jì)DSP/MCU的CAN接口是指芯片外設(shè)中的CAN總線控制器,其輸出電平為TTL規(guī)格�����,如果直接將兩塊芯片的CANRX�����、CANTX引腳連接�,無法實(shí)現(xiàn)CAN通訊。SAJ1000
2021-12-05 17:36:0842 基于X281x DSP集成的CAN總線,CAN是德國BOSCH公司為現(xiàn)代汽車應(yīng)用領(lǐng)域領(lǐng)先推出的一種多主局域網(wǎng)��,換句話說就是一條總線上可以掛多個主機(jī)進(jìn)行通信����。CAN總線是一種串行通信協(xié)議具有較高的通信
2022-06-13 15:05:412 CAN引導(dǎo)加載程序可通過CAN接口對MAXQ7665A微控制器進(jìn)行編程���。引導(dǎo)加載程序還可幫助設(shè)計(jì)人員更新/修改已在現(xiàn)場部署的產(chǎn)品的用戶應(yīng)用程序代碼�。
2023-02-21 16:40:331437 
can總線波特率一般采用多少 Can總線是指Controller Area Network,是一種高性能的串行通信協(xié)議�。Can總線廣泛應(yīng)用于汽車、工業(yè)控制系統(tǒng)以及其他需要大規(guī)模數(shù)據(jù)交換的領(lǐng)域�。Can
2023-09-07 15:05:386667 can總線為什么要用雙絞線����?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議�����,廣泛用于汽車、航空����、船舶、工業(yè)自動化��、機(jī)器人等領(lǐng)域���。CAN總線采用串行通信方式�,主要用于實(shí)現(xiàn)多個模塊之間的通信
2023-09-14 16:48:057576 電子發(fā)燒友網(wǎng)站提供《用于Hercules微控制器的CAN總線引導(dǎo)加載程序.pdf》資料免費(fèi)下載
2024-09-19 10:52:070 電子發(fā)燒友網(wǎng)站提供《用于Hercules微控制器的CAN總線引導(dǎo)加載程序.pdf》資料免費(fèi)下載
2024-09-19 10:55:170 開源硬件平臺��,通過添加CAN總線模塊�����,也可以實(shí)現(xiàn)CAN通信���。 硬件準(zhǔn)備 Arduino開發(fā)板 :可以選擇Arduino Uno�、Mega等型號����。 CAN總線模塊 :如MCP2515或MCP2562,這些模塊
2024-11-12 10:09:173772 的硬件模塊實(shí)現(xiàn)CAN總線通信�����。 硬件需求 Arduino板 :任何支持Arduino IDE的板子都可以,例如Arduino Uno���、Mega等����。 CAN總線模塊 :例如MCP2515或MCP2562
2024-12-23 09:06:443000
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論