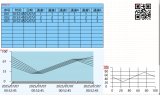
目前����,具有眾多不同品牌的儀器儀表���,用來測量工業(yè)現(xiàn)場液體或者固體的瞬時流量���,然后通過4-20mA信號傳....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 12-01 09:57
?1597次閱讀

本文就以改造一套以西門子S7-300 317-2DP PLC(6ES7 317-2AJ10-0AB0....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-25 14:27
?534次閱讀

電磁爐,這一現(xiàn)代廚房中的烹飪新星����,憑借其獨特的優(yōu)勢����,日益受到人們的青睞���。其便捷性和高效性,使得它成為....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-20 15:57
?5389次閱讀

卷徑計算�����,是動態(tài)計算如鋼卷�����,紙卷等存料量的一種方法�,它是實現(xiàn)張力控制和自動充放料、以及甩尾控制的重要....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-14 16:54
?1349次閱讀
單片機應用廣泛����,家用、農(nóng)用���、工業(yè)�、醫(yī)療�、通迅等都少不了由它組成控制系統(tǒng)�。
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-14 16:49
?7148次閱讀
在博途里Wincc或許有這兩個概念及定義��,但是在Wincc里面沒有這個概念和定義�,有的只是“多用戶項....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-14 16:46
?1732次閱讀

因為RS485接口組成的半雙工網(wǎng)絡一般只需二根連線,所以RS485接口均采用屏蔽雙絞線傳輸�。 RS4....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-12 14:26
?4685次閱讀

S7-1200系列PLC可以通過PROFINET與V90 PN型伺服驅(qū)動器組合進行速度控制,S7-1....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-12 14:20
?3608次閱讀
實際的PLC程序往往是某些典型小程序的擴展與疊加����,因此掌握一些典型小程序?qū)Υ笮蛷碗s程序的編寫非常有利....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-07 13:57
?4842次閱讀

如果是已經(jīng)生產(chǎn)或通過電的設備,那就要根據(jù)生產(chǎn)手冊或者出廠試車標簽確定最后通電時間���。不管是新舊設備��,這....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 11-06 14:54
?360次閱讀

該觸摸屏和S7-1200PLC進行以太網(wǎng)通訊�����,方便S7-1200的DB塊在觸摸屏做出對兩個從站相關(guān)的....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 10-30 11:30
?1816次閱讀

西門子G120變頻器控制單元自CU240E-2系列開始支持集成的安全功能�����。集成安全功能分為兩部分�����,分....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 10-24 09:13
?5120次閱讀

在原來的任務基礎上����,繪制變頻器控制回路。
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 10-15 14:48
?482次閱讀

在使用西門子S1200PLC�����,所使用的軟件是博途軟件�,在這個軟件里運用了塊的概念���。比如我們常見的組織....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 10-15 14:40
?2319次閱讀

大家在運動控制的時候是用伺服電機的還是用步進電機做定位控制了?為什么有時候用伺服電機�,有時候又步進電....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 10-15 14:32
?1370次閱讀

大家好��,收到粉絲投稿����,讓博主講下Static變量和Temp變量的區(qū)別,新入行的兄弟可能會對這兩個概念....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 09-24 14:51
?915次閱讀

我們多多少少都知道三極管的作用是放大信號���,但我猜你們有些人應該沒怎么明白其工作原理吧�����?反正我之前只知....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 09-22 09:25
?1339次閱讀
最近看到一個程序��,博圖定時器的in腳中寫了一個等式�,且是一個等號,不是兩個等號�����,有點小疑惑��,就做了個....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 09-08 11:46
?485次閱讀

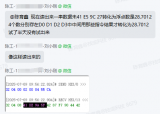
注意��,運行后需要先手動復位主站的監(jiān)控數(shù)據(jù)��,監(jiān)控出現(xiàn)問題時候的數(shù)據(jù)�,啟動等其它修改數(shù)據(jù)不需要,需運行時....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 09-05 16:45
?1324次閱讀

Modbus RTU是工業(yè)自動化領(lǐng)域常用的串行通信協(xié)議����,基于RS485、RS422或RS232物理層....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 08-19 13:59
?1561次閱讀
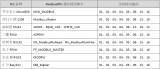
西門子在 STEP 7-Micro/WIN SMART 中正式推出 Modbus RTU 主站協(xié)議庫....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 08-19 13:52
?3926次閱讀

Modbus 通訊在工業(yè)現(xiàn)場應用非常廣泛�,當然也會有多技術(shù)難點,本文主要講解基于通訊的數(shù)據(jù)處理���,不講....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 08-19 13:48
?1214次閱讀
在平時開發(fā)中�,我們時常會遇到需要后臺靜默運行的應用場景,這些程序不需要用戶的直接操作或界面展示�����,而是....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 08-07 16:17
?2159次閱讀

串口自由協(xié)議通信是一種靈活的串行通信方式�����。在該模式下��,開發(fā)者無需遵循特定標準協(xié)議�,可根據(jù)實際需求自由....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 08-07 09:15
?1854次閱讀
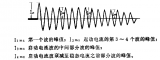
伺服電機的運行需要一個參考點�����,這個參考點就是原點�。原點通常是由光電開關(guān)或機械開關(guān)來確定的,其位置是固....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-26 09:43
?2746次閱讀

曾幾何時��,你的師傅告訴你��,電動機起動瞬間的“起動電流”一般為額定電流的13倍����,所以斷路器的磁脫扣至少....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-24 14:30
?1031次閱讀
一般我們在使用codesys平臺進行編程時��,如果不是用平臺自定義的可視化工具進入展示時�,這個時候我們....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-16 14:03
?2851次閱讀

目前正值夏季高溫天氣��,有的設備環(huán)境溫度高達55度���,到了考驗設備的時候了�,這兩天有接到客戶電話�����,CPU....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-15 10:58
?1411次閱讀

在工業(yè)自動化行業(yè)中PLC和HMI這倆個可是黃金搭檔�,PLC在那HMI就在那幾乎都是形影不離的。現(xiàn)場操....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-10 15:39
?1163次閱讀
Lexium18 系列伺服驅(qū)動器具有RS-485的串行通訊功能����,使用此功能可實現(xiàn)控制 伺服系統(tǒng)、讀取....
![的頭像]() 工控論壇 發(fā)表于
工控論壇 發(fā)表于 07-10 10:56
?1267次閱讀




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)