無(wú)人機(jī)就是不載人的飛行器���,而說(shuō)到飛行器�,通常我們又可以把飛行器分為三類。今天來(lái)給大家介紹下四旋翼無(wú)人機(jī)���,看看怎么是真正的技術(shù)�。
2018-06-17 22:50:45 37269
37269 ���!生產(chǎn)銷售�����,歡迎對(duì)無(wú)人機(jī)感興趣的小伙伴們都可以與我聯(lián)系?����。ㄗT先生)***推薦課程:張飛四旋翼飛行器視頻套件�,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2017-06-07 14:26:42
在無(wú)人機(jī)飛行控制系統(tǒng)中����,飛行控制器是其核心部件���,它負(fù)責(zé)飛行控制系統(tǒng)信號(hào)的采集、控制律的解算��、飛機(jī)的姿態(tài)和速度����,以及與地面設(shè)備的通訊等工作����。隨著無(wú)人機(jī)越來(lái)越廣泛的應(yīng)用,它所完成的任務(wù)也越來(lái)越復(fù)雜����,對(duì)無(wú)人機(jī)的機(jī)動(dòng)性要求也越來(lái)越高,這就要求無(wú)人機(jī)的控制核心向高集成度和小型化方向發(fā)展����。
2019-10-22 07:58:23
的構(gòu)造說(shuō)起了���。四旋翼飛行器配備了兩只功能強(qiáng)大的眼睛:一只能看清自己的“位置”����,知道自己是在黃山還是泰山,這就是自帶的GPS定位系統(tǒng)���;另一只能看清自己的“姿態(tài)”���,就是知道自己是“坐著”�、“躺著”����,還是
2016-07-14 10:46:08
、PLC����、DMA等周邊接口�,甚至LCD驅(qū)動(dòng)電路都整合在單一芯片上,形成芯片級(jí)的計(jì)算機(jī)�,為不同的應(yīng)用場(chǎng)合做不同組合控制���。無(wú)人機(jī)的主控MCU在無(wú)人機(jī)飛行系統(tǒng)中地位很重要����。無(wú)人機(jī)工作原理垂直運(yùn)動(dòng)�,無(wú)人機(jī)利用旋
2018-10-09 10:44:44
四旋翼飛行器14——無(wú)人機(jī)中的OSD、數(shù)傳�����、圖傳�、FPV是什么?
2019-07-02 15:21:03
美麗的衡水湖畔�,全國(guó)同行業(yè)無(wú)人機(jī)訓(xùn)練基地占地面積最大,獨(dú)立合法的空域保障實(shí)踐飛行訓(xùn)練的安全與合規(guī)���,目前多旋翼無(wú)人機(jī)AOPA培訓(xùn)已順利開(kāi)班九期����,累計(jì)培訓(xùn)學(xué)員180名,推薦就業(yè)130名��,自主創(chuàng)業(yè)50名�����,成為
2017-02-13 10:37:23
`無(wú)人機(jī)是一個(gè)新興的高科技產(chǎn)業(yè)�,從研發(fā)、制造到使用���、管理及服務(wù)涉及諸多領(lǐng)域���。那么你腦海中的無(wú)人機(jī)應(yīng)該是什么樣子的呢?搭載導(dǎo)彈的軍用機(jī)?迷你航拍的消費(fèi)機(jī)���?噴灑農(nóng)藥的農(nóng)用機(jī)......不可否認(rèn)�,無(wú)人機(jī)
2017-11-15 11:57:36
首先�����,什么是無(wú)人機(jī)�?濰坊大疆�,無(wú)人機(jī)是一種由無(wú)線電遙控設(shè)備或其自身的程序控制裝置操縱的無(wú)人機(jī)��。什么是AOPA��?飛機(jī)所有者和飛行員協(xié)會(huì)����。三�、什么是多旋翼無(wú)人機(jī)?有三個(gè)或更多旋翼的飛機(jī)�����。第四
2020-06-08 10:03:50
筆記來(lái)源于:沈陽(yáng)無(wú)距科技-工業(yè)級(jí)無(wú)人機(jī)的中國(guó)名片一��、多旋翼直升機(jī)無(wú)人駕駛飛機(jī)�����,簡(jiǎn)稱無(wú)人機(jī)���,英文Unmaned Aerial Vehicle, UAV由三個(gè)���、四個(gè)或更多螺旋槳所組成的無(wú)人機(jī)。最典型
2021-06-30 06:30:51
員可以借助無(wú)人機(jī)BMS參考設(shè)計(jì)為任何現(xiàn)有的無(wú)人機(jī)設(shè)計(jì)添加測(cè)量�、保護(hù)��、平衡和充電功能�����,并延長(zhǎng)飛行時(shí)間�����。該設(shè)計(jì)還具有電池充電控制器和高效DC/DC轉(zhuǎn)換器����,可以實(shí)現(xiàn)高效的能量轉(zhuǎn)換�����。此外�,它還能利用電量計(jì)準(zhǔn)確
2018-06-26 09:42:10
無(wú)人機(jī)呢? 一�、什么是植保無(wú)人機(jī)? 植保無(wú)人機(jī)顧名思義是用于農(nóng)林植物保護(hù)作業(yè)的無(wú)人駕駛飛機(jī),該型無(wú)人飛機(jī)有飛行平臺(tái)(固定翼�����、單旋翼�、多旋翼)、GPS飛控����、噴灑機(jī)構(gòu)三部分組成,通過(guò)地面遙控或GPS飛
2019-06-28 10:06:03
一般直升機(jī)那樣可變�。通過(guò)改變不同旋翼相對(duì)轉(zhuǎn)速可以改變單軸推進(jìn)力的大小��,從而控制飛行器的運(yùn)行軌跡.圖2 多軸飛行器圖3 各類變模態(tài)平臺(tái)二.無(wú)人機(jī)的系統(tǒng)架構(gòu)圖4 無(wú)人機(jī)系統(tǒng)架構(gòu)三.飛控系統(tǒng)簡(jiǎn)介導(dǎo)航飛控系統(tǒng)
2018-09-25 11:54:48
之間互相掣肘�,陷入了一個(gè)較為尷尬的境地����。 如果沒(méi)有足夠的續(xù)航能力,也就意味著執(zhí)行任務(wù)會(huì)受到很大限制�����,發(fā)揮不了最大優(yōu)勢(shì)����。另外,普通消費(fèi)級(jí)四旋翼無(wú)人機(jī)充電時(shí)間大概是一個(gè)半小時(shí)左右�����,在戶外飛行的飛友們誰(shuí)又
2018-07-14 14:08:48
無(wú)人機(jī)前傾����,無(wú)人機(jī)向前飛行。此時(shí)A在無(wú)人機(jī)的正前方向�����,但是一陣風(fēng)刮過(guò)���,無(wú)人機(jī)旋轉(zhuǎn)了,此時(shí)A在無(wú)人機(jī)的左邊�,我再按下按鍵一無(wú)人機(jī)往左邊飛,B在正前方�����,按下按鍵2���,無(wú)人機(jī)往前飛�,此時(shí)出現(xiàn)一個(gè)很嚴(yán)重的問(wèn)題,按鍵
2018-05-10 11:26:48
的狀態(tài),無(wú)人機(jī)駕駛員在未來(lái)二十年內(nèi)將是一個(gè)火爆的職業(yè)�。無(wú)人機(jī)培訓(xùn)基本內(nèi)容理論學(xué)習(xí)相關(guān)民航無(wú)人機(jī)法規(guī)����、無(wú)人機(jī)概述、系統(tǒng)組成及介紹�����、飛行原理與飛行性能���、氣象、空域與起降場(chǎng)��、任務(wù)規(guī)劃��、旋翼無(wú)人機(jī)原理構(gòu)造啟動(dòng)
2016-06-28 11:33:46
機(jī)器人領(lǐng)域的尖兵����。無(wú)人機(jī),顧名思義�����,即不載人的飛行器��。目前飛行器主要分為3類:固定翼(fixed wing)���;直升機(jī)(helicopter);多旋翼(multi-rotor)�。最近...
2021-08-09 07:14:23
]四旋翼飛行器pcb文件“開(kāi)源”:1份軟件代碼“開(kāi)源”:1份<span]BOM:1份視頻教程上部:共7小時(shí)15講(講解無(wú)人機(jī)結(jié)構(gòu)與原理圖)<span
2017-11-20 10:52:39
翼無(wú)人機(jī)��,開(kāi)傘時(shí)機(jī)方式不對(duì)極易造成纏繞動(dòng)力臂之類的情況發(fā)生而導(dǎo)致開(kāi)傘失敗�。本項(xiàng)目提出一套完整的多旋翼無(wú)人機(jī)安全保護(hù)系統(tǒng),該系統(tǒng)能自適應(yīng)當(dāng)前飛行控制器的操作方式����,根據(jù)當(dāng)前機(jī)體所處的狀態(tài),智能決定開(kāi)傘時(shí)機(jī)��,并且在開(kāi)傘時(shí)能自動(dòng)切
2015-10-23 10:10:01
` 本帖最后由 cztqwan 于 2016-5-3 14:22 編輯
【ELF靈翼自拍無(wú)人機(jī)測(cè)評(píng)】-3 飛行篇一����、綜合評(píng)價(jià): 操控手感:使用手機(jī)APP作為遙控器的手感要比實(shí)體遙控器的手感差上
2016-05-03 11:22:44
吸引人。再次之前也看到有人提出類似的想法����,只是一直沒(méi)看到實(shí)物����,恩孚電子算是通過(guò)四旋翼引領(lǐng)一種新的自拍方式的先驅(qū)�����。ELF-VRDrone(靈翼)迷你自拍無(wú)人機(jī)設(shè)計(jì)本身也是十分精致的����,用來(lái)航拍感覺(jué)也還不錯(cuò)�,不過(guò)
2016-05-06 01:29:41
ELF-VRDrone靈翼航拍無(wú)人機(jī)一方面是借鑒其硬件方面的設(shè)計(jì)和軟件方面的控制,另一方面對(duì)其功能和細(xì)節(jié)方面進(jìn)行體驗(yàn),如ELF整體產(chǎn)品外觀做工����、可玩性、APP操作方面����。之前有聽(tīng)說(shuō)類似的項(xiàng)目創(chuàng)意,但是具體沒(méi)真正
2016-04-19 18:01:27
申請(qǐng)理由:以前參加電子設(shè)計(jì)大賽的時(shí)候�,鼓搗過(guò)一段時(shí)間無(wú)人機(jī),一直對(duì)無(wú)人機(jī)非常感興趣��。ELF-VRDrone靈翼航拍無(wú)人機(jī)通過(guò)手機(jī)遙控,體積較小�,可以實(shí)現(xiàn)自主定高,實(shí)現(xiàn)航拍功能����,非常吸引人。項(xiàng)目描述
2016-04-19 18:02:09
申請(qǐng)理由:用于開(kāi)發(fā)四旋翼飛機(jī)���。本公司擁有多年的自動(dòng)控制開(kāi)發(fā)經(jīng)驗(yàn)���,已經(jīng)使用ST,GD��,Nuvotoon的多款MCU成功開(kāi)發(fā)出 多款四旋翼飛機(jī)�。并成功推向市場(chǎng)。項(xiàng)目描述:四旋翼無(wú)人機(jī)����,MM32F
2016-06-30 09:41:29
項(xiàng)目名稱:四旋翼無(wú)人機(jī)試用計(jì)劃:1、申請(qǐng)理由:無(wú)人的飛控版可由多塊芯片集成�����,以實(shí)現(xiàn)更強(qiáng)大的功能���,申請(qǐng)此板����,可以應(yīng)用到無(wú)人機(jī)開(kāi)發(fā)中,除了控制四個(gè)電調(diào)之外�����,協(xié)處理器的強(qiáng)大可以實(shí)現(xiàn)更多的功能�����,比如說(shuō)循跡�,聲控等����,攝像頭處理需要非常快的速度2��、試用計(jì)劃:7天之內(nèi)將飛控程序移植到LPC上�,30天實(shí)現(xiàn)循跡
2017-07-13 09:42:26
申請(qǐng)理由:前期有過(guò)ARM9系列嵌入式項(xiàng)目開(kāi)發(fā)經(jīng)驗(yàn),用過(guò)S3C2410做過(guò)四旋翼項(xiàng)目��。這次想使用Cortex-A8系列應(yīng)用到無(wú)人機(jī)項(xiàng)目中����,實(shí)現(xiàn)室內(nèi)機(jī)器視覺(jué)定位定點(diǎn)飛行任務(wù)����。項(xiàng)目描述:使用該嵌入式開(kāi)發(fā)
2015-07-24 13:19:45
本帖最后由 wangjiamin2014 于 2015-1-8 11:31 編輯
項(xiàng)目名稱:嵌入式四旋翼無(wú)人機(jī)的應(yīng)用 團(tuán)隊(duì)名稱:Simple團(tuán)隊(duì)成員:王天鵬 徐鵬飛作品演示密碼:123456
2015-01-07 18:22:37
完成。無(wú)人機(jī)眾籌學(xué)習(xí)詳細(xì)情況??點(diǎn)擊眾籌微信入口【眾籌支持者套餐選擇以及獲得哪些回報(bào)����?】套餐一:498元(限2000份)可獲得回報(bào)如下:四旋翼飛行器組裝件:1份遙控器:1臺(tái)贈(zèng)送程序燒錄器鋰電池:1塊
2017-11-19 23:36:05
/20170130479091.html8.多無(wú)人機(jī)分布式協(xié)同異構(gòu)任務(wù)分配http://www.brongaenegriffin.com/soft/study/ms/2017/20170130479078.html9.基于四旋翼無(wú)人機(jī)的輸電線路巡檢
2017-02-15 21:06:18
的直升機(jī)。旋翼的總距固定而不像一般直升機(jī)那樣可變�����。通過(guò)改變不同旋翼相對(duì)轉(zhuǎn)速可以改變單軸推進(jìn)力的大小�����,從而控制飛行器的運(yùn)行軌跡. 圖2 多軸飛行器 圖3 各類變模態(tài)平臺(tái) 二.無(wú)人機(jī)的系統(tǒng)架構(gòu) 圖4
2019-07-14 05:30:00
說(shuō)起了�。四旋翼飛行器裝備了兩只功能強(qiáng)大的雙眼:一只能看清自個(gè)的“方位”,知道自個(gè)是在黃山仍是泰山����,這即是自帶的GPS定位體系�;另一只能看清自個(gè)的“姿勢(shì)”�,即是知道自個(gè)是“坐著”���、“躺著”���,仍是“倒豎
2016-07-12 14:12:52
關(guān)于固定翼航模及四旋翼無(wú)人機(jī)基礎(chǔ)總結(jié)的太棒了
2021-09-23 07:34:52
! “電動(dòng)植保無(wú)人機(jī)”這個(gè)好聽(tīng)的名字���,既可植保�����,并且本身環(huán)保���。它就仿佛像一只蜘蛛,在它向外伸出的爪子上方裝有旋翼��,旋翼下方有噴藥裝置���。而肚子里就是裝載著農(nóng)藥�,然后通過(guò)旋翼下的噴嘴進(jìn)行噴灑���。隨著一陣無(wú)人機(jī)
2016-05-09 13:36:29
有人知道四旋翼無(wú)人機(jī)的代碼在什么地方下載嗎�����?
2016-06-26 18:36:27
玩轉(zhuǎn)四旋翼無(wú)人機(jī)(傳感器)
2019-09-16 06:27:22
最近我哥要給我郵遞個(gè)四旋翼無(wú)人機(jī)����,再加上本人對(duì)藍(lán)天從小就很感興趣����。。所以在學(xué)習(xí)完四驅(qū)小車后打算上手下無(wú)人機(jī)剛開(kāi)始學(xué)習(xí)根本不知道要看哪些�����,在幾天漫無(wú)頭緒的學(xué)習(xí)�,終于有點(diǎn)氣色了,就把學(xué)習(xí)經(jīng)驗(yàn)分享給大家
2021-08-09 08:25:03
`一.四旋翼飛行器簡(jiǎn)介四旋翼飛行器�����,又稱為四旋翼直升機(jī),顧名思義�,是一種具備4個(gè)螺旋槳的飛行器,與直升機(jī)類似�,可以完成空中懸停、飛行的動(dòng)作��。傳統(tǒng)直升機(jī)會(huì)用一個(gè)主槳來(lái)產(chǎn)生推力����,用一個(gè)尾槳來(lái)抵消主槳產(chǎn)生
2015-10-23 11:30:24
四旋翼微型飛行器是一種以4個(gè)電機(jī)作為動(dòng)力裝置.通過(guò)調(diào)節(jié)電機(jī)轉(zhuǎn)速來(lái)控制飛行的欠驅(qū)動(dòng)系統(tǒng);為了實(shí)現(xiàn)四旋翼微型飛行器的自主飛行控制,對(duì)飛行控制系統(tǒng)進(jìn)行了初步設(shè)計(jì),并且以C8051F020單片機(jī)為計(jì)算控制
2013-11-28 09:29:12
《多旋翼無(wú)人飛行器嵌入式飛控開(kāi)發(fā)指南》里基于FreeRTOS的無(wú)人機(jī)軟件框架
2021-12-24 06:37:33
無(wú)人機(jī)裝配有哪些?基于STM32F407的四旋翼無(wú)人機(jī)由哪些模塊組成的����?
2021-10-20 06:12:50
針對(duì)現(xiàn)階段三葉槳四旋翼飛行器平衡難以控制的問(wèn)題該文基于STM32單片機(jī)設(shè)計(jì)了- -個(gè)三葉槳四旋翼飛行器該飛行器采用四元數(shù)轉(zhuǎn)歐拉角算法和PID調(diào)節(jié)器實(shí)現(xiàn)了角速度與加速度到角度的轉(zhuǎn)換。該飛行器利用
2019-03-19 11:43:59
多旋翼無(wú)人機(jī)由哪幾部分組成�?
2021-09-24 08:22:13
扭矩)等;而旋翼機(jī)則介于飛機(jī)和直升機(jī)之間��,旋翼機(jī)的旋翼不與動(dòng)力系統(tǒng)相連��,由飛行過(guò)程中的前方氣流吹動(dòng)旋翼旋轉(zhuǎn)產(chǎn)生升力(像大風(fēng)車一樣)��,即旋翼為自轉(zhuǎn)式,傳遞到機(jī)身上的扭矩很小�����,無(wú)需專門抵消�����。而待設(shè)計(jì)的四旋
2016-12-23 23:20:13
在進(jìn)行多旋翼無(wú)人機(jī)飛控系統(tǒng)設(shè)計(jì)之前�,有必要列寫(xiě)一份詳細(xì)的設(shè)計(jì)方案書(shū);這是飛控系統(tǒng)設(shè)計(jì)的基石�����,并且在一定程度上指導(dǎo)了后續(xù)的研發(fā)工作���。本篇博文列寫(xiě)了之前筆者在進(jìn)行無(wú)人機(jī)飛控開(kāi)發(fā)過(guò)程中所撰寫(xiě)的精簡(jiǎn)版
2021-11-11 07:18:22
``最近看到一款無(wú)人機(jī)能實(shí)現(xiàn)整機(jī)防水�����,是全球首家能量產(chǎn)發(fā)型的防水無(wú)人機(jī)����, 就連當(dāng)初火爆一時(shí)的Lily主打防水,最終計(jì)劃流產(chǎn)�。看來(lái)無(wú)人機(jī)做防水��,確實(shí)是有點(diǎn)技術(shù)難點(diǎn)����!推薦課程:張飛四旋翼飛行器視頻套件
2018-01-06 15:25:15
去北方藍(lán)天無(wú)人機(jī)培訓(xùn)學(xué)校啊4大優(yōu)勢(shì):1�、包學(xué)包會(huì)、學(xué)會(huì)為止2�、免費(fèi)復(fù)訓(xùn)3、尊享優(yōu)惠����,創(chuàng)業(yè)支持4、百分之百取證就業(yè)��,多旋翼就業(yè)�,直升機(jī)就業(yè),固定翼就業(yè)����?�?蓮氖鹿ぷ鳎?b class="flag-6" style="color: red">無(wú)人機(jī)航拍,無(wú)人機(jī)電力巡線�����,無(wú)人機(jī)
2016-12-15 09:46:19
`無(wú)人機(jī)行業(yè)現(xiàn)在發(fā)展怎么樣���?國(guó)家支持么�?拿證真的能找到好的工作嗎��?推薦課程:張飛四旋翼飛行器視頻套件����,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post`
2016-12-16 09:27:19
好像就在一個(gè)月前,我真正開(kāi)始了和四旋翼無(wú)人機(jī)打交道�����。當(dāng)時(shí)��,我還是一個(gè)小白��,對(duì)無(wú)人機(jī)什么都不了解,而現(xiàn)在�。。我還是一個(gè)小白���。�����?��!,F(xiàn)在就讓這個(gè)白的發(fā)亮的小白來(lái)給大家介紹介紹入坑四旋翼無(wú)人機(jī)的一些準(zhǔn)備����,順便也就記錄一下這些天自己的收獲。(PS:白的發(fā)亮的小白�����,熱心大佬傾情贈(zèng)送的稱號(hào))下面進(jìn)入正題...
2021-09-02 07:50:28
���、什么是直升機(jī)無(wú)人機(jī)���? 由一個(gè)或兩個(gè)具有動(dòng)力的旋翼提供升力并進(jìn)行姿態(tài)操作的飛行器��?! ?�、什么是固定翼無(wú)人機(jī)����? 由固定在機(jī)身上具有翼型的機(jī)翼,通過(guò)與來(lái)流的空氣發(fā)生相對(duì)運(yùn)動(dòng)產(chǎn)生升力的飛行器����。 6����、多
2019-07-11 05:00:00
�����,市場(chǎng)價(jià)格也不是很貴�。相比大型無(wú)人機(jī),小型無(wú)人機(jī)操作起來(lái)很是方便�����。熟練的操作者可以使其往任意方向飛行,從而更好地滿足拍攝需要���。那么���,無(wú)人機(jī)的飛行原理是什么?(一)垂直運(yùn)動(dòng)無(wú)人機(jī)利用旋翼實(shí)現(xiàn)前進(jìn)和停止
2019-05-24 14:07:29
“張飛電子工程師速成視頻教程”�,將自己這十多年從事一線研發(fā)的經(jīng)驗(yàn)和心得分享給大家,教大家如何設(shè)計(jì)一個(gè)好的電路�;憑著過(guò)硬的技術(shù)現(xiàn)在已經(jīng)成功創(chuàng)立并經(jīng)營(yíng)一家年產(chǎn)值幾千萬(wàn)的科技公司。本次答疑活動(dòng)主題:無(wú)人機(jī)四旋翼
2018-05-09 19:27:57
怎樣去設(shè)計(jì)一種基于六旋翼無(wú)人機(jī)的智能空中作業(yè)機(jī)器人呢��?基于六旋翼無(wú)人機(jī)的智能空中作業(yè)機(jī)器人有哪些功能���?
2021-11-11 06:47:14
角線�����。??高速旋轉(zhuǎn)的四旋翼螺旋槳產(chǎn)生空氣對(duì)無(wú)人機(jī)的反作用力���,此反作用力為四旋翼垂直運(yùn)動(dòng)提供升力,除了垂直方向的升力��,因旋翼切面形狀而在水平方向產(chǎn)生的反作用力會(huì)使得單個(gè)旋翼有自旋的傾向��,為了解決這個(gè)
2021-07-19 06:34:31
如何利用PCB去制作無(wú)刷四旋翼無(wú)人機(jī)的機(jī)架?基于iNav開(kāi)源固件的無(wú)刷四旋翼無(wú)人機(jī)的飛控板該怎樣去設(shè)計(jì)��?
2021-08-19 07:06:44
求無(wú)人機(jī)入門技術(shù)推薦課程:張飛四旋翼飛行器視頻套件��,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2017-03-12 13:17:04
有沒(méi)有大神做過(guò)一些關(guān)于四旋翼無(wú)人機(jī)彈射裝置方面的東西,可以提供一些參考資料或者方法么��?
2019-07-15 04:36:28
往年無(wú)人機(jī)類題目中都是這樣規(guī)定:四旋翼飛行器可自制或外購(gòu)�,帶防撞網(wǎng)��;外形尺寸(含防撞網(wǎng))限定為長(zhǎng)度
2019-07-08 10:43:57
普通屏幕的畫(huà)面,你在頭顯上看到的圖像���,就是無(wú)人機(jī)攝像頭看到的畫(huà)面�����。競(jìng)速無(wú)人機(jī)和航拍無(wú)人機(jī)有什么區(qū)別�?競(jìng)速無(wú)人機(jī)比賽中一般分為固定翼無(wú)人機(jī)和多旋翼無(wú)人機(jī)��,但比較常見(jiàn)的還是多旋翼無(wú)人機(jī)��,這種無(wú)人機(jī)又稱
2016-06-22 09:46:38
近年來(lái),隨著智能化產(chǎn)業(yè)的迅速發(fā)展�����,無(wú)人機(jī)行業(yè)逐漸走進(jìn)人們的視線��。由于四旋翼無(wú)人機(jī)的結(jié)構(gòu)簡(jiǎn)單可靠�����,具有垂直起降��、定點(diǎn)懸停���、穩(wěn)定低速飛行和在小空間內(nèi)飛行的能力[1]���,所以受到廣泛的關(guān)注并在多個(gè)領(lǐng)域得到了廣泛的應(yīng)用
2015-07-07 09:37:393592 主要討論了一種微小型旋翼無(wú)人機(jī)的設(shè)計(jì)、制造與試飛驗(yàn)證����。在研究涵道風(fēng)扇式與“單旋翼 + 氣動(dòng)
面” 布局的微小型旋翼無(wú)人機(jī)特點(diǎn)的基礎(chǔ)上, 提出了微小型旋翼無(wú)人機(jī)總體設(shè)計(jì)方案���。利用計(jì)算流體力學(xué)軟件
2016-03-16 14:38:20 12
12 近兩天就有外媒報(bào)道����,美國(guó)的研究人員創(chuàng)造出了一款只有一個(gè)旋翼的無(wú)人飛行器�,該無(wú)人機(jī)采用了非對(duì)稱的設(shè)計(jì),更重要的是���,整個(gè)無(wú)人機(jī)唯一可以移動(dòng)的部件也只有一個(gè)螺旋槳�����。
2016-05-16 14:16:4410411 六旋翼農(nóng)用無(wú)人機(jī)設(shè)計(jì),硬件選型基礎(chǔ)知識(shí)�����,空氣動(dòng)力學(xué)基礎(chǔ)理論
2016-05-24 14:14:470 本文結(jié)合中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所開(kāi)放課題(室內(nèi)三維位置環(huán)境理解與自主控制研究)���,在總結(jié)四旋翼無(wú)人機(jī)研究現(xiàn)狀的基礎(chǔ)上��,開(kāi)展了四旋翼無(wú)人機(jī)系統(tǒng)的設(shè)計(jì)����、制作、調(diào)試和實(shí)現(xiàn)研究�。
2016-09-27 15:53:2316 近年來(lái)無(wú)人機(jī)市場(chǎng)的發(fā)展,多旋翼無(wú)人機(jī)以優(yōu)良的操控性能和可垂直起降的方便性等優(yōu)點(diǎn)迅速獲得了廣大消費(fèi)群體的關(guān)注����,成為迄今為止最熱銷的產(chǎn)品。多旋翼無(wú)機(jī)人相較于其它無(wú)人機(jī)具有得天獨(dú)厚的優(yōu)勢(shì)����,與固定翼飛機(jī)相比
2017-01-12 03:22:1249819 
小型四旋翼無(wú)人機(jī)組機(jī)方案
2017-06-20 14:43:3897 旋翼和輪子一樣,是一項(xiàng)神奇的發(fā)明���。 四旋翼無(wú)人機(jī)更是化作了航拍機(jī)�����,滿足了許多普通人關(guān)于天空的想象�����。 旋翼之所以能飛�����,玩過(guò)竹蜻蜓的朋友應(yīng)該都知道:當(dāng)手力搓動(dòng)給了竹蜻蜓一個(gè)旋轉(zhuǎn)的速度后就會(huì)產(chǎn)生升力��,讓竹
2017-09-20 10:17:5012 了解多旋翼無(wú)人機(jī)的結(jié)構(gòu)����,對(duì)選擇購(gòu)買、后續(xù)使用及維護(hù)都有很大的幫助���。今天我們將以大疆精靈Phantom 4 PROV2.0 為例���,介紹目前市面主流多旋翼無(wú)人機(jī)的結(jié)構(gòu)。
2018-06-05 07:49:006063 工業(yè)無(wú)人機(jī)廣泛應(yīng)用于安防領(lǐng)域��。無(wú)人機(jī)機(jī)載攝像頭到達(dá)現(xiàn)場(chǎng)之后能夠迅速展開(kāi)還可以多角度大范圍的進(jìn)行現(xiàn)場(chǎng)觀察���,具有不可替代的作用�����,是一般監(jiān)控設(shè)備無(wú)法比擬的?! 【?b class="flag-6" style="color: red">無(wú)人機(jī)多使用多旋翼警用無(wú)人機(jī),相比
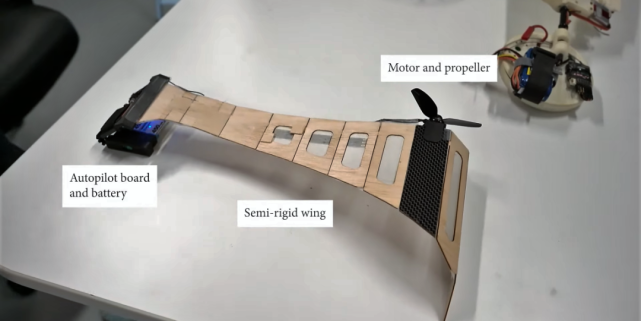
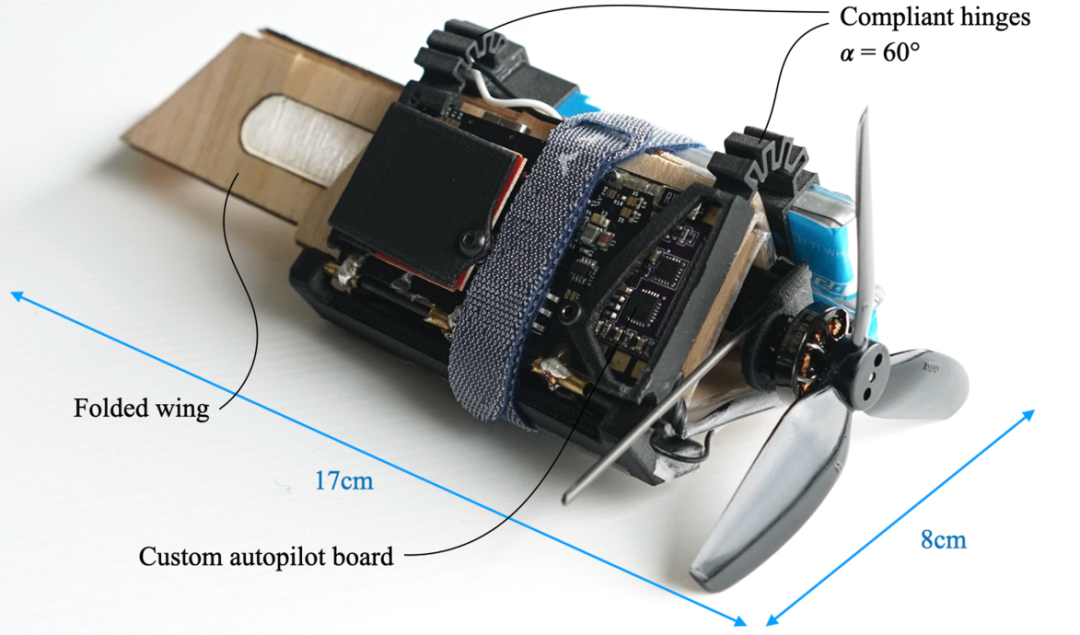
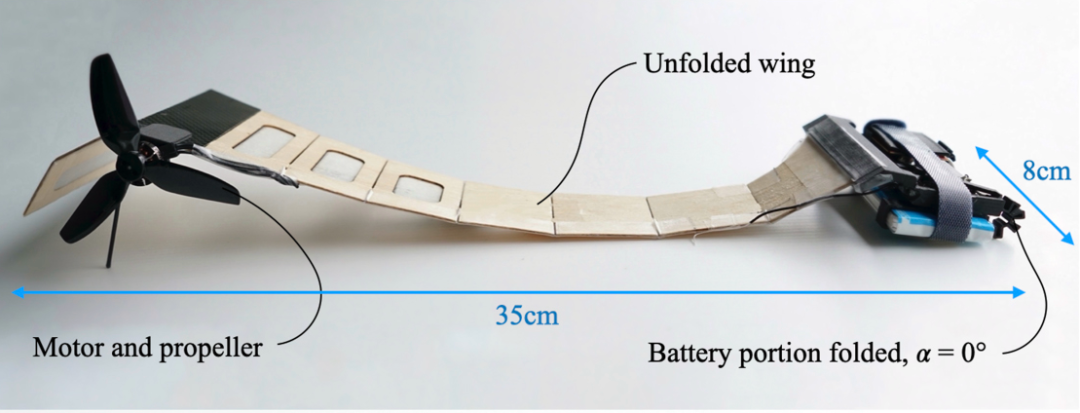
2018-04-27 20:36:44623 大家對(duì)無(wú)人機(jī)的認(rèn)知不外乎是定翼機(jī)與多旋翼機(jī),「翼」在無(wú)人機(jī)而言似乎是直線升空的主要部件�,但一旦旋翼毀壞,即會(huì)影響飛行����,造成墜機(jī)意外。有學(xué)生發(fā)揮極致創(chuàng)意����,嘗試挑戰(zhàn)上述固有認(rèn)知,開(kāi)發(fā)出不需旋翼的無(wú)人機(jī)����,這可能是全球首臺(tái)無(wú)旋翼設(shè)計(jì)的無(wú)人機(jī)!
2018-07-23 10:05:476650 四旋翼無(wú)人機(jī)是一種具有4個(gè)旋翼的飛行器�,有X型分布和十字型分布2種。文中采用的是X型分布的四旋翼���,四旋翼無(wú)人機(jī)只能通過(guò)改變旋翼的轉(zhuǎn)速來(lái)實(shí)現(xiàn)各種運(yùn)動(dòng)�。國(guó)外對(duì)四旋翼無(wú)人直升機(jī)的研究非?��;钴S���。加拿大雷克海德大學(xué)的Tavebi和McGilvrav證明了使用四旋翼設(shè)計(jì)可以實(shí)現(xiàn)穩(wěn)定的飛行���。
2020-04-19 08:02:009798 
與多旋翼無(wú)人機(jī)表演不同,固定翼無(wú)人機(jī)實(shí)現(xiàn)編隊(duì)要困難的多����。多旋翼無(wú)人機(jī)要想實(shí)現(xiàn)編隊(duì)只需要每架飛機(jī)在指定時(shí)間到達(dá)自己指定的位置就可以了,不需要管別的飛機(jī)���,是“開(kāi)環(huán)控制”�。而固定翼無(wú)人機(jī)飛行速度快��,每架
2018-09-17 17:13:4225426 在固定翼無(wú)人機(jī)靠近船的同時(shí)���,兩架自動(dòng)多旋翼無(wú)人機(jī)從船上起飛�。它們繼續(xù)在進(jìn)入無(wú)人機(jī)的路徑下并排懸停����,并在它們之間水平拉伸電纜。當(dāng)無(wú)人機(jī)捕獲線靠近線纜�����,該直升機(jī)開(kāi)始往無(wú)人機(jī)的同一方向飛行���。
2019-03-18 13:53:104162 四旋翼無(wú)人機(jī)已經(jīng)迅速地成為現(xiàn)象級(jí)的熱門產(chǎn)品���,甚至我們之前都沒(méi)有來(lái)得及細(xì)細(xì)研究它。
2019-10-31 16:57:403518 本文檔的主要內(nèi)容詳細(xì)介紹的是多旋翼無(wú)人機(jī)飛行器的入門學(xué)習(xí)資料和實(shí)踐說(shuō)明包括了:(1)無(wú)人飛行器概述 (2)多旋翼無(wú)人飛行器飛行控制系統(tǒng) (3)多旋翼無(wú)人飛行器模擬訓(xùn)練 (4)多旋翼無(wú)人飛行器的安裝調(diào)試
2019-11-04 08:00:0013 無(wú)人機(jī)的飛行控制主要來(lái)源于無(wú)人機(jī)的大腦��,也就是飛行控制系統(tǒng)是整個(gè)多旋翼飛行系統(tǒng)必不可少的部件�。
2020-01-29 09:17:0014146 多旋翼飛行器是通過(guò)調(diào)節(jié)多個(gè)電機(jī)轉(zhuǎn)速來(lái)改變螺旋槳轉(zhuǎn)速,實(shí)現(xiàn)升力的變化����,進(jìn)而達(dá)到飛行姿態(tài)控制的目的。以四旋翼飛行器為例�����,飛行原理如下圖所示����,電機(jī)1和電機(jī)3逆時(shí)針旋轉(zhuǎn)的同時(shí),電機(jī)2和電機(jī)4順時(shí)針旋轉(zhuǎn)��,因此
2020-01-24 13:44:0034969 六旋翼無(wú)人機(jī)是一種具備垂直升降�����、懸停等靈活飛行性能優(yōu)勢(shì)的小型無(wú)人飛行器,因此在某些環(huán) 境下比固定翼無(wú)人機(jī)具有更好地適用性��。它通過(guò)上下共軸放置的三組共六個(gè)電機(jī)提供升力�����,通過(guò)改變 旋翼轉(zhuǎn)速來(lái)調(diào)整姿態(tài)���,通過(guò)調(diào)整姿態(tài)進(jìn)一步實(shí)現(xiàn)位置控制��,具有懸停性能優(yōu)異�����、移動(dòng)靈活����、機(jī)械結(jié)構(gòu)緊湊、零部件可靠性高等優(yōu)點(diǎn)。
2020-05-12 10:27:463317 六旋翼無(wú)人機(jī)是一種具備垂直升降�、懸停等靈活飛行性能優(yōu)勢(shì)的小型無(wú)人飛行器���,因此在某些環(huán)境下比固定翼無(wú)人機(jī)具有更好地適用性。它通過(guò)上下共軸放置的三組共六個(gè)電機(jī)提供升力�,通過(guò)改變旋翼轉(zhuǎn)速來(lái)調(diào)整姿態(tài)�����,通過(guò)調(diào)整姿態(tài)進(jìn)一步實(shí)現(xiàn)位置控制,具有懸停性能優(yōu)異�、移動(dòng)靈活���、機(jī)械結(jié)構(gòu)緊湊���、零部件可靠性高等優(yōu)點(diǎn)。
2020-05-14 11:19:303737 多旋翼無(wú)人機(jī)設(shè)計(jì)原則有哪些呢���?多旋翼無(wú)人機(jī)設(shè)計(jì)是一個(gè)綜合性的系統(tǒng)���,在結(jié)構(gòu)方面,包括氣動(dòng)�,結(jié)構(gòu)�,強(qiáng)度,動(dòng)力,材料��,工藝���,外形等�。通過(guò)總體設(shè)計(jì)指標(biāo)�,分別將系統(tǒng)模塊化,設(shè)計(jì)模塊與模塊之間的接口,最后通過(guò)系統(tǒng)整合�����,實(shí)現(xiàn)多旋翼無(wú)人機(jī)總體設(shè)計(jì)思路��。
2020-05-22 10:45:064007 的控制技術(shù)便顯得尤為重要��。傳統(tǒng)的控制方法主要集中于姿態(tài)和高度的控制����,除此之外還有一些用來(lái)控制速度、位置����、航向、3D軌跡跟蹤控制��。多旋翼無(wú)人機(jī)的控制方法可以總結(jié)為以下三個(gè)主要的方面�。
2020-06-14 10:31:399713 這一矩陣系統(tǒng)包括CW-15F垂直起降固定翼無(wú)人機(jī)飛行平臺(tái)���、CW-15Q多旋翼無(wú)人機(jī)飛行平臺(tái)����、8個(gè)搭載不同任務(wù)設(shè)備的吊艙。兩個(gè)飛行平臺(tái)都可以根據(jù)任務(wù)需求選擇不同的吊艙�����,做到一機(jī)多用�����、一艙多用��。
2020-07-24 11:48:112444 蚊子無(wú)人機(jī)的飛行原理和傳統(tǒng)無(wú)人機(jī)完全不同�,可以認(rèn)為是微型無(wú)人機(jī)的一次創(chuàng)新。它不是固定翼也不是旋翼����,而是和蜻蜓一樣�,用振翅方式來(lái)提供升力和飛行控制。
2020-08-05 10:49:402868 多旋翼飛行器飛行操控品質(zhì)評(píng)價(jià)體系研究對(duì)于多旋翼工程設(shè)計(jì)及品質(zhì)提升方面有著十分重要的作用�。多旋翼飛行器飛行操控品質(zhì)至今仍沒(méi)有完善的系統(tǒng)理論和實(shí)踐依據(jù)�����,亟需提供一個(gè)完整且思路合理正確的多旋翼無(wú)人機(jī)操控品質(zhì)評(píng)價(jià)框架雛形,以建立一個(gè)完整的評(píng)價(jià)體系����。
2020-10-23 15:22:352866 據(jù)瑞士蘇黎世大學(xué)(UZH)官網(wǎng)近日?qǐng)?bào)道,該校與荷蘭代爾夫特理工大學(xué)找到了一個(gè)方法��,讓無(wú)人機(jī)在一個(gè)旋翼突然失效后��,可以利用機(jī)載攝像頭的信息在空中繼續(xù)自主飛行�。
2021-01-15 16:19:213513 固定翼無(wú)人機(jī)是無(wú)人機(jī)的一種�,它區(qū)別于旋翼、撲翼等無(wú)人機(jī)類型����。固定翼無(wú)人機(jī)
2021-03-07 11:22:0827795 四旋翼多旋翼 無(wú)人機(jī)特別火���,可以做航拍�,做玩具�,做特技,有哪些是多旋翼不能做�����,一定要固定翼來(lái)做的?
2021-03-07 11:29:5829820 為加強(qiáng)對(duì)工科專業(yè)大學(xué)生的科技創(chuàng)新和實(shí)踐能力培養(yǎng)��,以四旋翼無(wú)人機(jī)為載體種四旋翼無(wú)人機(jī)實(shí)驗(yàn)教學(xué)平臺(tái)ε該平臺(tái)主要包括硬件系統(tǒng)和軟件系統(tǒng)兩部分�����,硬件系統(tǒng)采用了基于STM3機(jī)的無(wú)人機(jī)飛行控制器��,配機(jī)機(jī)架�、激光
2021-03-25 10:00:144 而無(wú)人機(jī)按飛行平臺(tái)構(gòu)型分為固定翼無(wú)人機(jī)、旋翼無(wú)人機(jī)�、無(wú)人飛艇、傘翼無(wú)人機(jī)�����、撲翼無(wú)人機(jī)����、復(fù)合翼無(wú)人機(jī)六類;按用途可劃分為民用無(wú)人機(jī)和軍用無(wú)人機(jī)���。 FrostSullivan 中商產(chǎn)業(yè)研究院數(shù)據(jù)顯示
2021-09-28 14:54:496843 
0.1>0保持學(xué)習(xí),每天都在進(jìn)步�����,沒(méi)有人�,在年少時(shí)想成為一個(gè)普通人,四旋翼無(wú)人機(jī)從0到1的實(shí)現(xiàn)(一)無(wú)人機(jī)功能設(shè)計(jì)四旋翼無(wú)人機(jī)從0到1的實(shí)現(xiàn)(二)無(wú)人機(jī)單片機(jī)選型四旋翼無(wú)人機(jī)從0到1
2021-12-09 17:06:1237 1.1 旋翼無(wú)人機(jī)的技術(shù)組成旋翼無(wú)人機(jī)是一個(gè)整體的系統(tǒng)�����,由無(wú)人機(jī)機(jī)體本身����、任務(wù)載荷和地面通信基站共同組成,旋翼無(wú)人機(jī)的任務(wù)載荷可以根據(jù)實(shí)際需要來(lái)進(jìn)行更換�����。而地面通信基站是整個(gè)系統(tǒng)的控制中心��,決定著
2022-06-21 10:05:506529 無(wú)人機(jī)行業(yè)的近年蓬勃發(fā)展�����,宛如一片璀璨的新星匯聚成的輝煌星空�。創(chuàng)新和科技的融合將無(wú)人機(jī)推向生活的前沿�,成為引領(lǐng)時(shí)代的先鋒���。這是一場(chǎng)風(fēng)起云涌的科技巨變�����,為我們描繪出了一個(gè)嶄新而引人入勝的無(wú)人機(jī)時(shí)代�。
下面我們針對(duì)生活中常見(jiàn)的四旋翼無(wú)人機(jī)的飛行原理做個(gè)基礎(chǔ)的介紹�����。
2024-01-26 22:33:004605 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論