
KUKA機器人系統(tǒng)函數(shù):CIOCTL
CIOCTL僅與外部對象相關。 CIOCTL可用于將任何數(shù)據(jù)傳輸?shù)酵獠繉ο?,例如?配置數(shù)據(jù)以更改文....
KUKA軌跡位置系統(tǒng)變量$POS_BACK,$POS_FOR,$POS_INT和$POS_RET
POS_BACK可用于返回到中斷的動作指令的起始位置$POS_BACK對應于用于近似窗口內(nèi)的中斷的窗....





KUKA系統(tǒng)變量:$IOSIM_OPT模擬的激活或停用
使用了KUKA.OfficeSite,或者系統(tǒng)軟件的映像正在辦公電腦上運行。
CONTINUE如何防止程序行中出現(xiàn)的預進停止
你能用系統(tǒng)變量$ADVANCE定義先前控制器執(zhí)行的中斷如何動作。在指令關于外圍( 例如輸入/輸出指令....
S71500 硬件數(shù)據(jù)類型的常量
硬件數(shù)據(jù)類型:硬件數(shù)據(jù)類型由 CPU 提供。可用硬件數(shù)據(jù)類型的數(shù)目取決于 CPU。 根據(jù)硬件配置中設....


S71500-硬件數(shù)據(jù)類型介紹
硬件數(shù)據(jù)類型:硬件數(shù)據(jù)類型由 CPU 提供??捎糜布?shù)據(jù)類型的數(shù)目取決于 CPU。

西門子SCL中的SEL函數(shù)的使用方法
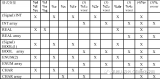
除ARRAY和ATRUCT數(shù)據(jù)類型和參數(shù)數(shù)據(jù)類型外的所有類型均作為輸入值。所有參數(shù)化變量均應是同一類....


KUKA機器人系統(tǒng)變量$PRO_NAME所選程序的名稱(參考解釋器)
如果機器人控制器在Multi-Submit模式下操作(僅適用于KUKA系統(tǒng)軟件8.3及更高版本),則....




WHILE ...ENDWHILE:編程設定當型循環(huán) .EXIT:離開循環(huán),無條件退出循環(huán).
當型循環(huán)。一直重復指令塊直到滿足了特定條件的循環(huán)。如果不滿足條件,則用 ENDWHILE 后的下一個....




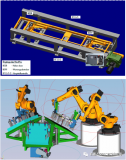
KUKA機器人-結構化機器人程序V5.9
機器人程序的結構是體現(xiàn)其使用價值的一個十分重要的因數(shù)。程序結構化越規(guī)范,程序就越易于理解、執(zhí)行效果越....

KUKA機器人DECL 聲明程序和數(shù)據(jù)列表中的變量和常量V5.9
“ =” 符號和最初的值以常量的形式跟隨變量名。當聲明默認的設置,你不能在聲明語句中列出多個變量。一....




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)