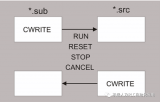
KUKA機器人系統(tǒng)函數(shù)StrCopy()復(fù)制字符串變量的方法
用函數(shù) StrCopy() 可以將字符串變量的內(nèi)容復(fù)制到另一個字符串變量中。
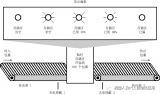
SCL程序: 檢測存儲區(qū)的填充量示例介紹
下圖顯示的系統(tǒng)中包含兩條傳送帶和一個臨時存儲區(qū),臨時存儲區(qū)位于兩條傳送帶之間。傳送帶 1 將包裹傳送....


西門子博途:S_PULSE:分配脈沖定時器參數(shù)并啟動
當輸入 S 的邏輯運算結(jié)果 (RLO) 的信號狀態(tài)從“0”變?yōu)椤?”(信號上升沿)時,指令“分配脈沖....


西門子博途SCL: FOR:在計數(shù)循環(huán)中執(zhí)行
使用“在計數(shù)循環(huán)中執(zhí)行”指令,重復(fù)執(zhí)行程序循環(huán),直至運行變量不在指定的取值范圍內(nèi)。

KUKA機器人控制系統(tǒng)的網(wǎng)絡(luò)連接
如果項目里已發(fā)生變化,則必須借助于 WorkVisual 將變化情況發(fā)送給控制系統(tǒng)。 庫卡將該過程稱....

西門子博途LAD-( JMP ):若 RLO = "1" 則跳轉(zhuǎn)
可以使用“若 RLO = "1" 則跳轉(zhuǎn)”指令中斷程序的順序執(zhí)行,并從其它程序段繼續(xù)執(zhí)行。

西門子博途:掃描操作數(shù)的信號下降沿
使用“掃描操作數(shù)的信號下降沿”指令,可以確定所指定操作數(shù)(<操作數(shù) 1>)的信號狀態(tài)是否從“1”變?yōu)椤?”。


西門子博途:尋址全局變量/訪問I/O設(shè)備
CPU 的過程映像是每個周期更新一次。但是,在對時間要求苛刻的應(yīng)用中,讀取或傳送數(shù)字輸入或輸出當前狀....


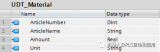
西門子博途:使用PLC數(shù)據(jù)類型 (UDT)
PLC 數(shù)據(jù)類型 (UDT) 是可自行定義且在程序中可以多次使用的數(shù)據(jù)結(jié)構(gòu)。 此結(jié)構(gòu)可包含不同數(shù)據(jù)類....

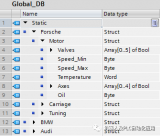
西門子博途有關(guān)STRUCT的基本信息
STRUCT 數(shù)據(jù)類型是指一種元素數(shù)量固定但數(shù)據(jù)類型不同的數(shù)據(jù)結(jié)構(gòu)。在結(jié)構(gòu)中,也可嵌套 STRUCT....
REPEAT:不滿足條件時執(zhí)行
使用“不滿足條件時執(zhí)行”指令可以重復(fù)執(zhí)行程序循環(huán),直至不滿足執(zhí)行條件為止。該條件是結(jié)果為布爾值(TR....
S_OFFDT:分配關(guān)斷延時定時器參數(shù)并啟動
當輸入 S 的邏輯運算結(jié)果 (RLO) 的信號狀態(tài)從“1”變?yōu)椤?”(信號下降沿)時,指令“分配關(guān)斷....

西門子博途SHL左移指令詳解
使用“左移”指令,可以將參數(shù) IN 的內(nèi)容逐位向左移動,并將結(jié)果作為函數(shù)值返回。參數(shù) N 用于指定應(yīng)....


西門子博途:SCL:TOF:關(guān)斷延時
可以使用“關(guān)斷延時”指令將 Q 參數(shù)的復(fù)位延時 PT 指定的一段時間。當參數(shù) IN 的邏輯運算結(jié)果 ....


KUKA機器人: 如何比較兩個字符串變量
用功能 StrComp() 可以比較兩個字符串變量。
Comp = StrComp( StrC....

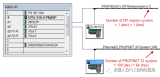
SIMATIC PN/CAN LINK CANopen Manager配置說明
配置說明? 步驟1,在博途里添加硬件設(shè)備,在網(wǎng)絡(luò)視圖下,雙擊硬件目錄,在網(wǎng)關(guān)目錄下點開PN/CAN ....




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)