“告別檢測(cè)系統(tǒng)能力缺陷���!10+年LabVIEW視覺資深專家手把手教你:5000+分鐘高清教程(含工具���、算法原理、實(shí)戰(zhàn)操作��、項(xiàng)目?jī)?yōu)化全流程講解)”——從傳統(tǒng)視覺算法→深度學(xué)習(xí)建?!I(yè)級(jí)部署"
2025-12-30 08:06:30 67
67 
在現(xiàn)代工業(yè)自動(dòng)化中�,PLC遠(yuǎn)程控制功能越來越重要��,尤其是在設(shè)備分布廣泛或環(huán)境復(fù)雜的場(chǎng)景中���。通過無線通信技術(shù)�,可以實(shí)現(xiàn)PLC的遠(yuǎn)程控制����,顯著提高生產(chǎn)效率和運(yùn)維便捷性。本文將詳細(xì)介紹基于無線的PLC遠(yuǎn)程控制設(shè)置方法����。 以DTD418MB 實(shí)現(xiàn)組態(tài)王對(duì)AB820 PLC 的遠(yuǎn)程無線控制為例。 一�����、硬件連接 將上位機(jī)與 DTD418MB 通過通訊線連接���,一端接入 DTD418MB 的 RJ45 接口,另一端接入上位機(jī)的 RJ45 接口�����; 同樣,用通訊線將 PLC 與 DTD418MB 連接�����,一端接入 DTD418MB 的
2025-12-24 11:36:5595 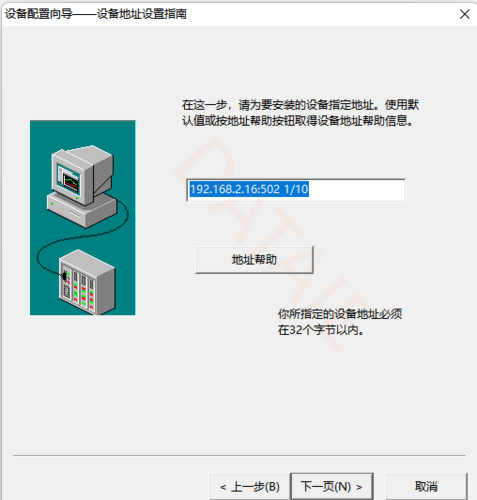
中小工廠砸?guī)资f(wàn)搞智能改造,結(jié)果踩了最冤的坑:花 “智慧工廠系統(tǒng)” 的錢�����,買的只是個(gè) “升級(jí)款工廠監(jiān)控系統(tǒng)”—— 只能看設(shè)備轉(zhuǎn)不轉(zhuǎn)����,沒法調(diào)生產(chǎn)、降能耗�����,錢直接打了水漂���。智能改造選系統(tǒng)��,真的像開盲盒�?其實(shí)只要搞懂核心區(qū)別��,再找對(duì)工具����,就能避開 “花大錢買錯(cuò)工具” 的坑 —— 有人物聯(lián)網(wǎng)就是中小廠的 “智能改造避坑指南庫(kù)” �����。 一��、智能改造最易踩的坑:系統(tǒng)認(rèn)錯(cuò)�,錢白扔 很多廠剛?cè)腴T時(shí)����,都會(huì)把這倆核心系統(tǒng)搞混: 智慧工廠系
2025-12-19 14:20:21137 
一�、文字教程簡(jiǎn)介本教程旨在演示EWD22S-A01TR的正確接線方法。材料準(zhǔn)備EWD22S-A01TR一臺(tái)220V交流電源一根220V交流電燈一臺(tái)433M天線一根接線步驟電源輸入端連接將220V交流電源火線與EWD22S-A01TR的電源輸入L端連接將220V交流電源零線與EWD22S-A01TR的電源輸入N端連接電燈輸出端連接將220V交流電燈火線與E
2025-12-11 19:33:48192 
不同的開發(fā)環(huán)境�,設(shè)置方法也各不相同�����。本文將手把手教你如何在主流的CS+for CC���、e2studio和IAR Embedded Workbench中完成這兩項(xiàng)重要配置�����。
2025-12-11 16:33:204263 
你是否在選購(gòu)SG三相隔離變壓器時(shí)感到迷茫�,擔(dān)心選錯(cuò)型號(hào)導(dǎo)致能效低下或設(shè)備損壞?對(duì)于設(shè)備維護(hù)人員和采購(gòu)者來說���,錯(cuò)誤選擇不僅浪費(fèi)資金�,更可能帶來持續(xù)的運(yùn)維問題����。今天,我們從專業(yè)角度出發(fā)���,手把手教你
2025-12-11 15:47:41213 
?在電商競(jìng)爭(zhēng)日益激烈的今天�����,掌握商品價(jià)格動(dòng)態(tài)已成為商家制定靈活定價(jià)策略的關(guān)鍵���。本文將手把手教你如何通過京東API實(shí)現(xiàn)實(shí)時(shí)價(jià)格監(jiān)控,為您的商業(yè)決策提供數(shù)據(jù)支撐�。 一、京東API的價(jià)值解析 京東開放平臺(tái)
2025-12-09 17:36:26781 
視覺算子詳解》一書����;開發(fā)了《龍哥手把手教你學(xué)視覺》系列包含視覺、運(yùn)動(dòng)控制����、深度學(xué)習(xí)在內(nèi)的全套5000+分鐘視頻教程���。
發(fā)燒友官方統(tǒng)計(jì)累計(jì)學(xué)員達(dá)20000余人��,部分學(xué)員現(xiàn)任職于華為�、比亞迪、富士康等頭部
2025-12-04 09:28:20
視覺算子詳解》一書��;開發(fā)了《龍哥手把手教你學(xué)視覺》系列包含視覺��、運(yùn)動(dòng)控制����、深度學(xué)習(xí)在內(nèi)的全套5000+分鐘視頻教程。
發(fā)燒友官方統(tǒng)計(jì)累計(jì)學(xué)員達(dá)20000余人�����,部分學(xué)員現(xiàn)任職于華為�����、比亞迪、富士康等頭部
2025-12-03 13:50:14
“告別檢測(cè)系統(tǒng)能力缺陷�!10+年LabVIEW視覺資深專家手把手教你:5000+分鐘高清教程(含工具、算法原理���、實(shí)戰(zhàn)操作���、項(xiàng)目?jī)?yōu)化全流程講解)”——從傳統(tǒng)視覺算法→深度學(xué)習(xí)建模→工業(yè)級(jí)部署"
2025-12-02 08:07:22310 當(dāng)我們談?wù)摗爸悄芄S”時(shí)�,許多傳統(tǒng)企業(yè)的管理者第一反應(yīng)是:推倒重來,投資千萬(wàn)���,周期漫長(zhǎng)�����,望而卻步��。但這其實(shí)是一個(gè)巨大的誤解��! 智能化的本質(zhì)是“賦能”��,而非“替代” ���。本文將為你揭秘,如何利用成熟可靠的工業(yè)互聯(lián)網(wǎng)技術(shù)��,像給老汽車安裝“自動(dòng)駕駛套件”一樣���,讓你的傳統(tǒng)工廠實(shí)現(xiàn)低成本����、高效率的“賽博重生”��! 一���、靈魂拷問:為什么要改造�?目標(biāo)在哪�? 改造不是跟風(fēng),而是為了解決切膚之痛�����。在動(dòng)工前,必須先進(jìn)行靈魂拷問:
2025-11-25 16:51:42355 迅為Hi3403開發(fā)板極速啟航 | 手把手帶你玩轉(zhuǎn)核心例程���,輕松上手AI視覺�����!
2025-11-19 13:56:081537 
【迅為RK3568開發(fā)板NPU實(shí)戰(zhàn)】別再閑置你的NPU�����!手把手教你玩轉(zhuǎn)RKNN-Toolkit2 的使用
2025-11-11 14:21:10696 
對(duì)智慧視覺領(lǐng)域感興趣��,或是行業(yè)從業(yè)者注意啦!11月13日20:00��,RT-Thread攜手富瀚微技術(shù)專家�,為您帶來FH8626V300L全棧開發(fā)實(shí)戰(zhàn)線上直播���,手把手帶你從芯片解讀到RT-Thread
2025-11-11 11:53:35628 
【RK3568 NPU實(shí)戰(zhàn)】別再閑置你的NPU�!手把手帶你用迅為資料跑通Android AI檢測(cè)Demo����,附完整流程與效果
2025-11-10 15:58:29942 
《手把手教你設(shè)計(jì)CPU》書上運(yùn)行Verilog仿真測(cè)試那章說為了重現(xiàn)仿真環(huán)境�����,最好在Linux環(huán)境下�。不知道移植蜂鳥是否需要在Linux環(huán)境下����,直接在Windows操作系統(tǒng)可否移植開發(fā)��。
2025-11-10 07:42:13
前提條件:
1)開發(fā)板是Digilent的ARTY A7-35T開發(fā)版�����,也就是《手把手教你設(shè)計(jì)CPU-RISC-V處理器》中介紹的那塊板子
2)vivado安裝正常��,可以啟動(dòng)�����,跑make mcs
2025-11-07 06:05:07
想用ESP32-S3開發(fā)板驅(qū)動(dòng)無刷電機(jī)卻不知從何下手�����?本教程將手把手教你完成從硬件連接到軟件編程的全流程,無論你是新手還是有一定經(jīng)驗(yàn)的開發(fā)者�����,都能輕松掌握��!本教程代碼已全部開源����!后臺(tái)私信關(guān)鍵詞
2025-11-06 18:03:59457 
想要快速掌握LuatOS GNSS定位調(diào)試?本文將以手把手的方式�����,帶領(lǐng)您一步步完成調(diào)試流程���。無論您是初學(xué)者還是有一定經(jīng)驗(yàn)的開發(fā)者,這份實(shí)用操作指南都能幫助您有效提升調(diào)試效率����,確保定位功能穩(wěn)定可靠
2025-11-04 18:30:081323 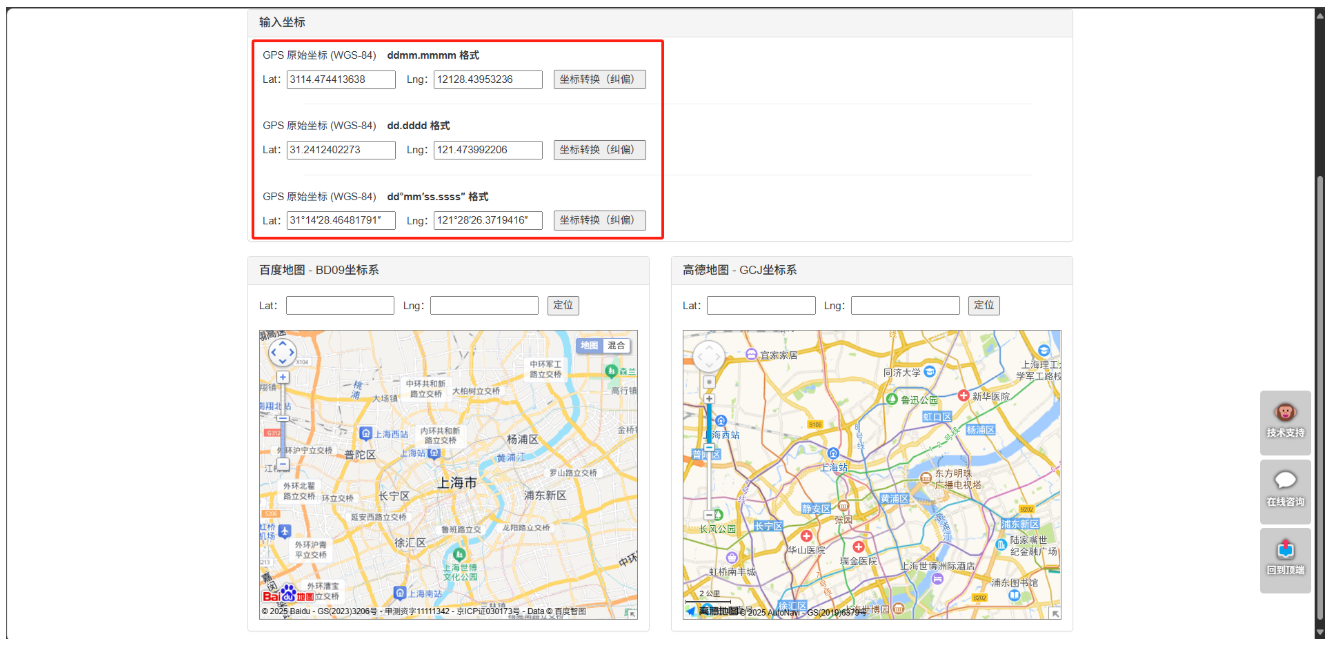
你是否也遇到過這些困擾:電腦突然變得異?�?D�,程序無響應(yīng)?想知道電腦狀態(tài)�,卻懶得每次都打開任務(wù)管理器?想要實(shí)時(shí)監(jiān)控系統(tǒng)性能��,又沒有合適的工具�?別擔(dān)心!今天我們教你一個(gè)簡(jiǎn)單又低成本的方法——用
2025-11-04 18:05:07403 最近發(fā)布的202102版本的Nuclei Studio IDE增加了QEMU仿真器�,可支持RV-STAR開發(fā)板的仿真,本教程旨在介紹如何使用該仿真環(huán)境進(jìn)行RISC-V嵌入式開發(fā)��。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
Nuclei Studio IDE 202102版
Nuclei Studio的下載和安裝
在芯來科技官網(wǎng)文檔與工具頁(yè)面可以下載 Nuclei Studio IDE軟件���,其鏈接如下:
https://www.nucleisys.com/download.php
根據(jù)自己的操作系統(tǒng)下載對(duì)應(yīng)的文件即可����,IDE不需要安裝�,下載后直接解壓縮即可使用;
啟動(dòng)Nuclei Studio
在 Nuclei Studio 解壓縮的目錄下雙擊 NucleiStudio.exe 即可啟動(dòng) IDE��;第一次啟動(dòng) Nuclei Studio 將會(huì)彈出對(duì)話框要求設(shè)置 Workspace 目錄路徑���,該目錄將用于存放后續(xù)創(chuàng)建的項(xiàng)目工程文件�。設(shè)置好 Workspace 路徑,再單擊 “Launch” 啟動(dòng) Nuclei Studio�;啟動(dòng)后頁(yè)面如下圖,推薦打開 Launch Bar 功能����,方便快速編譯和調(diào)試。打開菜單欄 “Window -> Preferences”���,搜索 “bar”���,勾選第一個(gè)選項(xiàng) “Enable the Launch Bar”即可啟用 Launch Bar 功能。下滑查看更多
新建模板helloworld工程
在菜單欄中���,選擇 “File-> New -> C/C++ Project” 開始新建工程����,在彈窗中雙擊選擇 “C Managed Build” ���;
新的頁(yè)面中 “Project name” 填寫 “helloworld” , “Project type”選擇 “Nuclei SDK Project For GD32VF103 SoC” 和 “RISC-V Cross GCC” ��,如下圖�,點(diǎn)擊 “Next” ���。新的頁(yè)面不用修改,直接點(diǎn)擊 “Next” 即可����;
我們?cè)谶x擇 Board 時(shí),請(qǐng)記得一定要選 gd32vf103v_rvstar 這塊板子噢����!
在選擇模板工程頁(yè)面修改“Project Example”選項(xiàng)為“baremetal_helloworld”。
后續(xù)頁(yè)面不需要修改��,點(diǎn)擊“Next”直到最后一頁(yè)����,點(diǎn)擊“Finish”完成新建模板helloworld工程。最終IDE界面顯示如下:
調(diào)試helloworld
在Launch Bar可以看到有兩個(gè)配置如下圖
我們看一下QEMU的配置��,這些已經(jīng)配置好了����,如果不太了解的同學(xué),這里基本上可以不用進(jìn)行任何設(shè)置�。
然后選中 debug 模式并啟動(dòng) debug
編譯器對(duì)代碼進(jìn)行編譯后,會(huì)跳出 Switch 框,選 Switch 后進(jìn)入調(diào)試模式
調(diào)試模式的界面如下
IDE提供了豐富的調(diào)試工具���,具體的就不一一介紹了���,大家可以去嘗試。
雖然是在QEMU仿真環(huán)境下����,但應(yīng)用的還是gdb調(diào)試工具,所以也是支持gdb命令行調(diào)試的����,選中Debugger Console,就可以輸入gdb命令了。
我們可以查看一下仿真環(huán)境下的寄存器�����。結(jié)果如下圖�����,更多命令使用大家可以自行查閱gdb的使用手冊(cè)�。
當(dāng)然����,也可以在圖形界面中查看寄存器�。
在工具欄選 :
Window ->Show View ->Registers
在彈出的 Registers 框中����,就可以非常方便的查看寄存器信息。我們可以在調(diào)試過程中查看相關(guān)信息的變化�。
運(yùn)行helloworld
在調(diào)試模式下代碼無bug,我們可以直接運(yùn)行代碼查看運(yùn)行結(jié)果�����,在run程序前��,一定要將之前啟動(dòng)的QEMU結(jié)束掉���,不管是openOCD還是QEMU的進(jìn)程都是排它性�,所以運(yùn)行或者調(diào)試結(jié)束后���,一定要記得點(diǎn)關(guān)閉按鈕����。不然后報(bào)錯(cuò)如下圖:
結(jié)束QEMU依次點(diǎn)下面三個(gè)按鈕�����,確保進(jìn)程已結(jié)束。
結(jié)束調(diào)試后開始運(yùn)行前����,建議clean一下工程,在工程名上左鍵->clean Project,IDE就會(huì)幫您清除掉編譯生成的編譯文件����。
直接點(diǎn)運(yùn)行,就可以了看到IDE開始編譯代碼并運(yùn)行����,如果代碼正確,就會(huì)輸出代碼的結(jié)果��。
下滑查看更多
在沒有連接板子的情況下��,我們成功運(yùn)行了helloworld程序�����。
至此�,在Nuclei Studio中基于QEMU進(jìn)行嵌入式代碼開發(fā)和調(diào)試的介紹就結(jié)束了�����。
2025-10-31 08:54:30
?上期內(nèi)容講解了UART串口通信的應(yīng)用方法,本期內(nèi)容的主角是另一種嵌入式系統(tǒng)中常用的通信協(xié)議——I2C(Inter-Integrated Circuit)�����。本期內(nèi)容將帶領(lǐng)大家使用RV-STAR開發(fā)板來控制OLED液晶屏顯示不同的字符和圖像,從而初步了解I2C總線通信的應(yīng)用方法�����。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
[size=14.6667px]NucleiStudio IDE 202102版或PlatformIO IDE
硬件需求
RV-STAR開發(fā)板、
0.96英寸OLED顯示屏(I2C接口)
I2C協(xié)議介紹
I2C是由NXP(原PHILIPS)公司開發(fā)的兩線式串行總線�����,用于連接微控制器及其外圍芯片���,目前已成為一種行業(yè)標(biāo)準(zhǔn)����,在微控制器設(shè)計(jì)中被大量采用,在RV-STAR所使用的GD32VF103微控制器上也集成了I2C接口�����。
I2C總線的主要特點(diǎn)是接線簡(jiǎn)單�����,硬件上只需兩條線�,一根SCL時(shí)鐘線用于收發(fā)雙方的時(shí)鐘節(jié)拍�,一根SDA數(shù)據(jù)線負(fù)責(zé)傳輸數(shù)據(jù),因此I2C是一種同步通信��。
I2C可以掛載多個(gè)參與通信的器件����,即多機(jī)模式,且任何一個(gè)器件都可以作為主機(jī)��,在多數(shù)情況下由微控制器作為主機(jī)���,在本次的實(shí)驗(yàn)中也是如此����。
I2C的數(shù)據(jù)傳輸流程和UART具有相似之處�,包括起始信號(hào)���、數(shù)據(jù)傳輸和停止信號(hào)���,其中和UART不同的地方在于,數(shù)據(jù)傳輸?shù)淖止?jié)數(shù)沒有限制���,可以一次傳輸很多個(gè)字節(jié)���,每個(gè)字節(jié)后跟有一個(gè)應(yīng)答位(即ACK),有點(diǎn)類似于UART的停止位����。
I2C在應(yīng)用時(shí),在發(fā)送了起始信號(hào)(Start)后��,要先發(fā)送一個(gè)7位的從機(jī)地址�����,緊跟著的第8位是數(shù)據(jù)方向位(R/W),“0”表示接下來要發(fā)送數(shù)據(jù)�����,“1”表示接下來要讀數(shù)據(jù)����。當(dāng)發(fā)送完這個(gè)8個(gè)位后,如果發(fā)送的地址有設(shè)備存在���,這個(gè)設(shè)備應(yīng)該回復(fù)一個(gè)ACK(拉低SDA���,輸出“0”),這樣才會(huì)繼續(xù)進(jìn)行通信流程����。
OLED液晶屏介紹
OLED(Organic Light-Emitting Diode,有機(jī)發(fā)光二極管)因?yàn)榫邆漭p薄����、省電、顯示效果好等特性,被廣泛應(yīng)用手機(jī)�����、音樂播放器等電子設(shè)備中�����。
本次實(shí)驗(yàn)用到的OLED液晶屏參數(shù)如下:
尺寸0.96英寸
分辨率128*64
可視角度大于160°
功耗0.06w
供電范圍3.3v~5v
工作溫度-30℃~70℃
體積27mm*27mm*2mm
亮度可通過指令控制
驅(qū)動(dòng)芯片SSD1306
接口I2C
GD32VF103的I2C接口
GD32VF103的I2C(內(nèi)部集成電路總線)模塊提供了符合工業(yè)標(biāo)準(zhǔn)的兩線串行制接口���,可用于MCU和外部I2C設(shè)備的通訊。I2C總線使用兩條串行線:串行數(shù)據(jù)線SDA和串行時(shí)鐘線SCL�����。I2C接口模塊實(shí)現(xiàn)了I2C協(xié)議的標(biāo)速模式(最高100KHz)和快速模式(最高400KHz)�����,具備CRC計(jì)算和校驗(yàn)功能�,支持SMBus(系統(tǒng)管理總線)和 PMBus(電源管理總線)。此外還支持多主機(jī)I2C總線架構(gòu)����。I2C接口模塊也支持DMA模式,可有效減輕CPU的負(fù)擔(dān)��。
更詳細(xì)內(nèi)容請(qǐng)參考《GD32VF103用戶手冊(cè)》。
實(shí)驗(yàn)部分
首先需要將RV-STAR開發(fā)板及OLED顯示屏參照下圖使用杜邦線進(jìn)行連線:
然后在IDE中進(jìn)行代碼編寫��,在使用I2C接口的時(shí)候����,首先要對(duì)其進(jìn)行初始化:先使能外設(shè)時(shí)鐘,然后將SDA�����、SCL兩個(gè)引腳配置為開漏模式�,之后需要依次設(shè)置I2C的時(shí)鐘速率、地址�����,然后使能I2C和ACK��。其相關(guān)代碼如下:
[size=0.85em]void I2C_Configuration(void)
{
uint32_t GPIO_SDA, GPIO_SCL;
uint32_t GPIO_PIN_SDA, GPIO_PIN_SCL;
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_I2C1);
GPIO_SDA = GPIOB;
GPIO_PIN_SDA = GPIO_PIN_11;
GPIO_SCL = GPIOB;
GPIO_PIN_SCL = GPIO_PIN_10;
gpio_init(GPIO_SCL, GPIO_MODE_AF_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_SCL);
gpio_init(GPIO_SDA, GPIO_MODE_AF_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_SDA);
i2c_clock_config(I2C1, 400000, I2C_DTCY_2);
i2c_mode_addr_config(I2C1, I2C_I2CMODE_ENABLE, I2C_ADDFORMAT_7BITS, 0x30);
i2c_enable(I2C1);
i2c_ack_config(I2C1, I2C_ACK_ENABLE);
}
在本次實(shí)驗(yàn)中��,由于使用的是“主發(fā)從收”模式��,RV-STAR開發(fā)板作為主機(jī)��,通過向OLED屏幕發(fā)送指令和數(shù)據(jù),從而控制OLED屏幕顯示不同的字符和圖像����,所以除初始化I2C外設(shè)的函數(shù)外,接下來需要實(shí)現(xiàn)一個(gè)讓主機(jī)向從機(jī)發(fā)送字節(jié)的函數(shù)�,其代碼和注釋如下:
void I2C_WriteByte(uint8_t addr, uint8_t data)
{
/* wait until I2C bus is idle */
while(i2c_flag_get(I2C1, I2C_FLAG_I2CBSY));
/* send a start condition to I2C bus */
i2c_start_on_bus(I2C1);
/* wait until SBSEND bit is set */
while(!i2c_flag_get(I2C1, I2C_FLAG_SBSEND));
/* send slave address to I2C bus*/
i2c_master_addressing(I2C1, 0x78, I2C_TRANSMITTER);
/* wait until ADDSEND bit is set*/
while(!i2c_flag_get(I2C1, I2C_FLAG_ADDSEND));
/* clear ADDSEND bit */
i2c_flag_clear(I2C1, I2C_FLAG_ADDSEND);
/* send a addr byte */
i2c_data_transmit(I2C1, addr);
/* wait until the transmission data register is empty*/
while(!i2c_flag_get(I2C1, I2C_FLAG_TBE));
/* send a data byte */
i2c_data_transmit(I2C1, data);
/* wait until the transmission data register is empty*/
while(!i2c_flag_get(I2C1, I2C_FLAG_TBE));
/* send a stop condition to I2C bus*/
i2c_stop_on_bus(I2C1);
/* wait until stop condition generate */
while(I2C_CTL0(I2C1)&0x0200);
}
發(fā)送字節(jié)的過程在代碼中配有詳細(xì)注釋(其中OLED屏幕的I2C地址默認(rèn)為0x78),在實(shí)現(xiàn)了I2C的初始化和字節(jié)發(fā)送功能后���,OLED的具體控制實(shí)現(xiàn)起來就相當(dāng)容易了���,其相關(guān)接口和函數(shù)的說明在代碼中都進(jìn)行了注釋,這里不進(jìn)行贅述���,大家可以通過閱讀項(xiàng)目源代碼進(jìn)行了解。
完整代碼請(qǐng)參考https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/i2c/i2c_oled_screen
實(shí)驗(yàn)現(xiàn)象參考以下動(dòng)圖
2025-10-31 08:48:56
相對(duì)于抽象層次更高的C/C++語(yǔ)言�����,匯編語(yǔ)言是一門抽象層次比較低的語(yǔ)言��,面向的是最底層的硬件�,直接使用處理器的基本指令。雖然現(xiàn)在大多數(shù)的程序設(shè)計(jì)已經(jīng)不再使用匯編語(yǔ)言�,但是在一些特殊的場(chǎng)合,譬如底層驅(qū)動(dòng)、引導(dǎo)程序�、高性能算法庫(kù)等領(lǐng)域,匯編語(yǔ)言還經(jīng)常扮演著重要的角色�����。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
Nuclei Studio IDE 202102版
匯編語(yǔ)句組成
匯編程序的最基本元素是指令���,指令集是處理器架構(gòu)的最基本要素����,因此RISC-V匯編語(yǔ)言的最基本元素自然是一條條的RISC-V指令��。除了指令之外��,由于此處所用RISC-V工具鏈?zhǔn)荊CC工具鏈���,因此一般的GNU匯編語(yǔ)法也能被GCC的匯編器識(shí)別��,GNU匯編語(yǔ)法中定義的偽操作���、操作符����、標(biāo)簽等語(yǔ)法規(guī)則均可以在RISC-V匯編語(yǔ)言中使用。
一條典型的RISC-V匯編語(yǔ)句由4部分組成����,包含如下字段:
[size=0.85em][label:] opcode [operands] [;comment]
[標(biāo)簽:]操作碼[操作數(shù)][;注釋]
標(biāo)簽
表示當(dāng)前指令的位置標(biāo)記。
操作碼
可以是如下任意一種:
RISC-V指令的指令名稱���,譬如addi指令��、lw指令等�����。
匯編語(yǔ)言的偽操作����。
用戶自定義的宏����。
操作數(shù)
操作碼所需的參數(shù)���,與操作碼之間以空格分開�����,可以是符號(hào)�����、常量�,或者由符號(hào)和常量組成的表達(dá)式。
注釋
為了程序代碼便于理解而添加的信息�,注釋并不發(fā)揮實(shí)際功能,僅起到注解作用����。注釋是可選的,如果添加注釋��,需要注意以下規(guī)則:
以“�;”或者“#”作為分隔號(hào),以分隔號(hào)開始的本行之后部分到本行結(jié)束都會(huì)被當(dāng)作注釋���。
或者使用類似C語(yǔ)言的注釋語(yǔ)法//和/* */對(duì)單行或者大段程序進(jìn)行注釋���。
匯編程序偽操作
在匯編語(yǔ)言中,有一些特殊的操作助記符通常被稱為偽操作(Pseudo Ops)��。偽操作在匯編程序中的作用是指導(dǎo)匯編器處理匯編程序的行為����,且僅在匯編過程中起作用�,一旦匯編結(jié)束����,偽操作的使命就此結(jié)束。
此處所用的RISC-V工具鏈?zhǔn)荊CC工具鏈����,一般的GNU匯編語(yǔ)法中定義的偽操作均可在RISC-V匯編語(yǔ)言中使用。經(jīng)過不斷地增加��,目前GNU匯編中定義的偽操作數(shù)目眾多����,感興趣的讀者可以自行查閱完整的GNU匯編語(yǔ)法手冊(cè)。這里將僅簡(jiǎn)單介紹一些常見的偽操作����。.globalsymbol_name 或者 .globlsymbol_name.global和.globl偽操作用于定義一個(gè)全局的符號(hào),使得鏈接器能夠全局識(shí)別它��,即一個(gè)程序文件中定義的符號(hào)能夠被所有其他程序文件可見�。.weaksymbol_name
在匯編程序中���,符號(hào)的默認(rèn)屬性為強(qiáng) (strong),.weak偽操作則用于設(shè)置符號(hào)的屬性為弱 (weak),如果此符號(hào)之前沒有定義過����,那么同時(shí)創(chuàng)建此符號(hào)并定義其屬性為 weak�����。如果符號(hào)的屬性為 weak,那么它無須定義具體的內(nèi)容�。在鏈接的過程中��,另外一個(gè)屬性為 strong的同名符號(hào)可以將此weak符號(hào)的內(nèi)容強(qiáng)制覆蓋���。利用此特性, .weak偽操作常用于預(yù)留一個(gè)空符號(hào)��,使得其能夠通過匯編器語(yǔ)法檢查�,但是在后續(xù)的程序中定義符號(hào)的真正實(shí)體,并且在鏈接階段將空符號(hào)覆蓋并鏈接�。.aligninteger
.align 偽操作用于將當(dāng)前PC地址推進(jìn)到 “2的integer次方字節(jié)” 對(duì)齊的位置。譬如 “.align 3” 表示將當(dāng)前PC地址推進(jìn)到8個(gè)字節(jié)對(duì)齊的位置處���。.sectionname [, subsection]
.section 偽操作指明將接下來的代碼匯編鏈接到名為 name的段 (Section)中,還可以指定可選的子段 (Subsection)�����,常見的段有 .text�����、.data�����、.rodata、.bss。例如 �,“.section .text”偽操作將接下來的代碼匯編鏈接到 .text段�。
匯編程序定義標(biāo)簽
標(biāo)簽名稱通常在一個(gè)冒號(hào)(:)之前��,常見的標(biāo)簽分為文本標(biāo)簽和數(shù)字標(biāo)簽�����。
文本標(biāo)簽在一個(gè)程序文件中是全局可見的�,因此定義必須使用獨(dú)一無二的命名���,文本標(biāo)簽通常被作為分支或跳轉(zhuǎn)指令的目標(biāo)地址���,示例如下:
loop://定義一個(gè)名為loop的標(biāo)簽,該標(biāo)簽代表了此處的PC地址
......
j loop//跳轉(zhuǎn)指令跳轉(zhuǎn)到標(biāo)簽loop所在的位置
數(shù)字標(biāo)簽為0~9之間的數(shù)字表示的標(biāo)簽���,數(shù)字標(biāo)簽屬于一種局部標(biāo)簽,需要時(shí)可以被重新定義�����。在被引用時(shí)���,數(shù)字標(biāo)簽通常需要帶上一個(gè)字母“f”或者“b”的后綴���,“f”表示向前��,“b”表示向后����,示例如下:
j 1f //跳轉(zhuǎn)到“向前尋找第一個(gè)數(shù)字為1的標(biāo)簽”所在的位置�,即下一行
//(標(biāo)簽為1)所在的位置
1:
j 1b//跳轉(zhuǎn)到“向后尋找第一個(gè)數(shù)字為1的標(biāo)簽”所在的位置,即上一行
//(標(biāo)簽為1)所在的位置
匯編程序定義宏
宏(macro)是將匯編語(yǔ)言中具有一組獨(dú)立功能的匯編語(yǔ)句組織在一起�����,然后可以以宏調(diào)用的方式進(jìn)行調(diào)用�����。示例如下:
.macro mac, a, b, c //定義一個(gè)名為mac的宏����,參數(shù)為a、b�����、c
mul t0, b, c// mul指令將b和c相乘得到乘積寫入t0寄存器
add a, t0, a// add指令將a與t0相加���,將乘累加結(jié)果寫入a
.endm
//調(diào)用mac宏
mac x1, x2, x3
完整實(shí)例
為了便于理解匯編程序���,我們以 RV-STAR工程的非向量中斷處理匯編代碼為實(shí)例����,講解匯編程序���。
在 Nuclei Studio中新建一個(gè) helloworld工程�。芯來科技官網(wǎng)的文檔與工具頁(yè)面可以下載Nuclei Studio�����,下載后解壓縮�����,在 Nuclei Studio解壓縮的目錄下雙擊 NucleiStudio.exe即可啟動(dòng) IDE�。
第一次啟動(dòng) Nuclei Studio將會(huì)彈出對(duì)話框要求設(shè)置 Workspace目錄路徑,該目錄將用于存放后續(xù)創(chuàng)建的項(xiàng)目工程文件���。設(shè)置好 Workspace路徑����,再單擊 “Launch”啟動(dòng) Nuclei Studio���。
啟動(dòng)后推薦打開Launch Bar功能����,方便快速編譯和調(diào)試。打開菜單欄“Window -> Preferences”�,搜索“bar”,勾選第一個(gè)選項(xiàng)“Enable the Launch Bar”即可啟用Launch Bar功能����。
在菜單欄中����,選擇“File-> New -> C/C++ Project”開始新建工程��,在彈窗中雙擊選擇“C Managed Build”�。
新的頁(yè)面中“Project name”填寫“iasm”����,“Project type” 選擇“Nuclei SDK Project For GD32VF103 SoC”和“RISC-V Cross GCC”,如下圖�����,點(diǎn)擊“Next”���。新的頁(yè)面不用修改�,直接點(diǎn)擊“Next”即可���。
在選擇模板工程頁(yè)面修改“Project Example”選項(xiàng)為“baremetal_helloworld”�����,后續(xù)頁(yè)面不需要修改��,點(diǎn)擊“Next”直到最后一頁(yè)����,點(diǎn)擊“Finish”完成新建helloworld工程����。
打開 “nuclei_sdk->SoC->gd32vf103->Common->Source->GCC->intexc_g32vf103.S” 文件,翻到第144行開始到184行結(jié)束就是非向量中斷處理匯編代碼���。這里列出具體代碼�����,逐行講解各個(gè)匯編代碼的作用���。
.section .text.trap//將接下來的代碼匯編鏈接到text段的trap段中
.align 6//2的6次方字節(jié)位置對(duì)齊
.global exc_entry//全局變量exc_entry
.weak exc_entry//定義屬性為弱的變量exc_entry
exc_entry://名為exc_entry的標(biāo)簽
SAVE_CONTEXT//調(diào)用宏SAVE_CONTEXT,作用是保存上下文
SAVE_CSR_CONTEXT//調(diào)用宏SAVE_CSR_CONTEXT�����,作用是保存寄存器內(nèi)容
csrr a0, mcause//將寄存器mcause的值傳入通用寄存器a0
mv a1, sp//將sp的值傳入通用寄存器a1
call core_exception_handler//調(diào)用中斷處理函數(shù)��,將前面?zhèn)鞯腶0和a1作為函數(shù)的參數(shù)
RESTORE_CSR_CONTEXT//調(diào)用宏RESTORE_CSR_CONTEXT����,作用是恢復(fù)保存的寄存器內(nèi)容
RESTORE_CONTEXT //調(diào)用宏RESTORE_CONTEXT�����,作用是恢復(fù)保存的上下文
mret //退出中斷處理函數(shù)
在匯編中調(diào)用C/C++函數(shù)
除了在C/C++程序中內(nèi)嵌匯編程序之外����,還可以在匯編程序中調(diào)用C/C++函數(shù)�����。這種情形在實(shí)際的工程中也很常見�,C/C++語(yǔ)言構(gòu)造的函數(shù)非常普遍,前面的中斷處理函數(shù)中正是調(diào)用C/C++的函數(shù)����。
在介紹C/C++函數(shù)調(diào)用之前,先介紹應(yīng)用程序二進(jìn)制接口(Abstract Binary Interface���,ABI)����,ABI描述了應(yīng)用程序和操作系統(tǒng)之間�����、應(yīng)用和它的庫(kù)之間,以及應(yīng)用的組成部分之間的接口��。
ABI涵蓋了如下細(xì)節(jié):
數(shù)據(jù)類型的大小�、布局和對(duì)齊。
函數(shù)調(diào)用約定(控制著函數(shù)的參數(shù)如何傳送以及接受返回值)�,例如�����,是所有的參數(shù)都通過棧傳遞�����,還是部分參數(shù)通過寄存器傳遞�����;哪個(gè)寄存器用于哪個(gè)函數(shù)參數(shù)��;通過棧傳遞的第一個(gè)函數(shù)參數(shù)是最先還是最后推到棧上�����。
系統(tǒng)調(diào)用的編碼和一個(gè)應(yīng)用如何向操作系統(tǒng)進(jìn)行系統(tǒng)調(diào)用。
在一個(gè)完整的操作系統(tǒng)ABI中�,目標(biāo)文件的二進(jìn)制格式、程序庫(kù)等�。
其中,函數(shù)調(diào)用約定決定了函數(shù)調(diào)用時(shí)參數(shù)傳遞和函數(shù)返回結(jié)果的規(guī)則����,有關(guān)RISC-V架構(gòu)ABI的函數(shù)調(diào)用約定,可以查看RISC-V的架構(gòu)手冊(cè)�。
對(duì)于RISC-V匯編程序而言,在匯編程序中調(diào)用C/C++語(yǔ)言函數(shù)����,必須遵照ABI所定義的函數(shù)調(diào)用規(guī)則,即函數(shù)參數(shù)由寄存器a0~a7傳遞����,函數(shù)返回由寄存器a0~a1指定。上面匯編實(shí)例中調(diào)用的c函數(shù)代碼如下:
uint32_t core_exception_handler(unsigned long mcause, unsigned long sp)
{
uint32_t EXCn = (uint32_t)(mcause & 0X00000fff);
EXC_HANDLER exc_handler;
if ((EXCn < MAX_SYSTEM_EXCEPTION_NUM) && (EXCn >= 0)) {
exc_handler = (EXC_HANDLER)SystemExceptionHandlers[EXCn];
} else if (EXCn == NMI_EXCn) {
exc_handler = (EXC_HANDLER)SystemExceptionHandlers[MAX_SYSTEM_EXCEPTION_NUM];
} else {
exc_handler = (EXC_HANDLER)system_default_exception_handler;
}
if (exc_handler != NULL) {
exc_handler(mcause, sp);
}
return 0;
}
此函數(shù)有兩個(gè)參數(shù)�,分別為mcause和sp,返回一個(gè)返回值���。所以匯編中調(diào)用此函數(shù)前�����,分別向a0和a1寄存器中寫入mcause和sp的值�。
2025-10-31 08:46:48
?上期內(nèi)容我們介紹了定時(shí)器的PWM輸出功能,本期內(nèi)容來介紹一下定時(shí)器的正交譯碼器功能(編碼器接口)����。正交譯碼器是和正交編碼器外設(shè)配合使用的,可對(duì)編碼器輸入的脈沖進(jìn)行計(jì)數(shù)進(jìn)而實(shí)現(xiàn)速度測(cè)量����,本期內(nèi)容我們通過一個(gè)使用旋轉(zhuǎn)編碼器的計(jì)數(shù)小實(shí)驗(yàn),來初步了解它的應(yīng)用方法���。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
NucleiStudio IDE 202102版
或 PlatformIO IDE
硬件需求
RV-STAR開發(fā)板
旋轉(zhuǎn)編碼器
正交編碼器
正交編碼器(Quadrature Encoder)是一種用于測(cè)量旋轉(zhuǎn)速度和方向的傳感器。常見的正交編碼器有兩個(gè)輸出信號(hào):A信道和B信道�����。每個(gè)信道可以對(duì)運(yùn)動(dòng)進(jìn)行測(cè)量并產(chǎn)生數(shù)字脈沖���,這兩個(gè)脈沖的相位相差90度(因此稱為“正交”)����,這使得你可以根據(jù)它們判斷運(yùn)動(dòng)的方向�����,通過積分(累加)運(yùn)算后,還可以用來測(cè)算距離�。
上圖中,A和B分別連接到兩個(gè)傳感器單元上���,黑白相間的圓環(huán)稱之為「柵格」����。傳感器單元和柵格的實(shí)現(xiàn)方式有很多種�����,包括「反射式傳感器+反光率不同的柵格」「對(duì)射式傳感器+鏤空光柵」「霍爾傳感器+磁極圓環(huán)」「觸點(diǎn)+導(dǎo)軌」等����。
本次實(shí)驗(yàn)中,我們使用的是下圖所示的市面上常見的旋轉(zhuǎn)編碼器(數(shù)字電位器):
GD32VF103的正交譯碼器
正交譯碼器功能使用TIMERx_CH0和TIMERx_CH1引腳生成的CI0和CI1正交信號(hào)各自相互作用產(chǎn)生計(jì)數(shù)值����。通過設(shè)置SMC=0x01、0x02或0x03來選擇是僅由CI0���、僅由CI1�、或者由CI0和CI1來決定定時(shí)器的計(jì)數(shù)方向。在每個(gè)方向選擇源的電平改變期間��,DIR位是由硬件自動(dòng)改變的����。計(jì)數(shù)器計(jì)數(shù)方向改變的機(jī)制如下方的圖表所示。
正交譯碼器可以當(dāng)作一個(gè)帶有方向選擇的外部時(shí)鐘�����,這意味著計(jì)數(shù)器會(huì)在0和自動(dòng)加載值之間連續(xù)地計(jì)數(shù)����。因此,用戶必須在計(jì)數(shù)器開始計(jì)數(shù)前配置TIMERx_CAR寄存器����。
實(shí)驗(yàn)部分
首先需要參照如下的示意圖�,對(duì)RV-STAR開發(fā)板和旋轉(zhuǎn)編碼器進(jìn)行連線:
然后在集成開發(fā)環(huán)境中創(chuàng)建一個(gè)新工程,開始編寫代碼�����。
首先需要對(duì)定時(shí)器的編碼器接口進(jìn)行配置,我們使用的是TIMER2的編碼器接口���,對(duì)應(yīng)的是PA6和PA7引腳����,首先要使能它們的外設(shè)時(shí)鐘和復(fù)用時(shí)鐘����,然后配置為浮空輸入模式。
接著需要?jiǎng)?chuàng)建定時(shí)器初始化參數(shù)結(jié)構(gòu)體�����,對(duì)定時(shí)器的功能進(jìn)行配置���,其中需要注意的是要將結(jié)構(gòu)體參數(shù)的預(yù)分頻系數(shù)設(shè)為0���,周期設(shè)為10000(即定時(shí)器的自動(dòng)加載值,也可以設(shè)為其他值)�����,然后需要將定時(shí)器的模式設(shè)置為TIMER_ENCODER_MODE2(編碼器模式�,使用CI0和CI1計(jì)數(shù))��,然后將定時(shí)器的計(jì)數(shù)值配置為5000(這樣讀取定時(shí)器計(jì)數(shù)的初值就是5000)��,最后使能TIMER2���。
相關(guān)代碼實(shí)現(xiàn)如下:
[size=0.85em]void encoder_init()
{
/* TIMER2_CH0 - PA6, TIMER2_CH1 - PA7 */
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_6 | GPIO_PIN_7);
rcu_periph_clock_enable(RCU_TIMER2);
timer_deinit(TIMER2);
/* initialize TIMER init parameter struct */
timer_parameter_struct timer_initpara;
timer_struct_para_init(&timer_initpara);
/* TIMER2 configuration */
timer_initpara.prescaler = 0;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 10000; /* set auto-reload value */
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_init(TIMER2, &timer_initpara);
/* select the encoder mode */
timer_slave_mode_select(TIMER2, TIMER_ENCODER_MODE2);
timer_counter_value_config(TIMER2, 5000); /* config the initial value */
timer_enable(TIMER2);
}
本次實(shí)驗(yàn),我們通過串口的打印輸出來查看編碼器的計(jì)數(shù)值�,因此在主程序中需要對(duì)串口進(jìn)行初始化,然后在循環(huán)體中���,每次讀取依次定時(shí)器的計(jì)數(shù)值�����,再打印輸出到串口����。
[size=0.85em]int main()
{
encoder_init();
gd_com_init(GD32_COM0);
int counter = 0;
while (1) {
counter = timer_counter_read(TIMER2);
printf("Counter: %dn", counter);
delay_1ms(500);
}
}
代碼編寫完成后�����,進(jìn)行編譯和上傳�����,然后打開串口終端(波特率115200)��,可以查看到在串口終端中輸出定時(shí)器的初值為5000:
然后順時(shí)針旋轉(zhuǎn)編碼器的旋鈕��,觀察到計(jì)數(shù)值增加�����,并且每轉(zhuǎn)動(dòng)一個(gè)單位計(jì)數(shù)值增加4�,符合芯片數(shù)據(jù)手冊(cè)中的功能描述:
逆時(shí)針旋轉(zhuǎn),計(jì)數(shù)值減少:
掃碼獲取實(shí)驗(yàn)源碼https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/timer/timer_encoder_counter
2025-10-31 08:21:16
?外部中斷是單片機(jī)實(shí)時(shí)地處理外部事件的一種機(jī)制�。具體指的是,當(dāng)某種外部事件發(fā)生時(shí)���,單片機(jī)的中斷系統(tǒng)迫使CPU暫停正在執(zhí)行的程序�����,轉(zhuǎn)而去進(jìn)行中斷事件的處理����;中斷處理完畢后����,又返回被中斷的程序處��,繼續(xù)執(zhí)行下去�。這里我們以Nuclei Board Labs中exti_key_interrupt應(yīng)用程序?yàn)槔?��,?jiǎn)單講解外部中斷的非向量處理模式�����。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
[size=14.6667px]NucleiStudio IDE 202102版
硬件需求
RV-STAR開發(fā)板
中斷知識(shí)介紹
外部中斷處理介紹
在SoC層面��,GD32VF103芯片有多個(gè)外部中斷源�����,具體包含哪些外部中斷�,可以在GD32VF103用戶手冊(cè)的第六章:中斷/事件控制器(EXTI)中查看�����。
本次實(shí)驗(yàn)使用用戶按鍵連接的GPIO作為外部中斷觸發(fā)源���,經(jīng)過SoC層面的中斷/事件控制器(EXTI)檢測(cè)后�,再傳遞給增強(qiáng)的內(nèi)核中斷控制器(ECLIC)����,交由內(nèi)核進(jìn)行中斷管理。
關(guān)于GPIO的使用請(qǐng)看《RVMCU課堂[11]——GPIO使用篇》�����,這里不做介紹��。
中斷/事件控制器(EXTI)的架構(gòu)框圖如下:
EXTI(中斷/事件控制器)有19個(gè)獨(dú)立的邊沿檢測(cè)單元��,分別對(duì)應(yīng)連接EXTI0~18��,其中的16個(gè)中斷源連接的是GPIO�����。EXTI有三種觸發(fā)類型:上升沿觸發(fā)����、下降沿觸發(fā)和任意沿觸發(fā)。EXTI中的每 一個(gè)邊沿檢測(cè)電路都可以獨(dú)立配置和屏蔽���。
中斷初始化函數(shù)介紹
為了方便進(jìn)一步講解����,我們先打開Nuclei Board Labs中exti_key_interrupt實(shí)驗(yàn)的main.c函數(shù)源碼。其中�����,main函數(shù)調(diào)用的“ECLIC_Register_IRQ”函數(shù)就是中斷配置函數(shù)���。截取ECLIC初始化函數(shù)代碼如下:[size=0.85em]/* ECLIC config */
returnCode = ECLIC_Register_IRQ( EXTI0_IRQn, ECLIC_NON_VECTOR_INTERRUPT,
ECLIC_LEVEL_TRIGGER,
1,
0,
NULL);
在《RVMCU課堂[10]——處理器內(nèi)部中斷篇》已經(jīng)對(duì)此函數(shù)各參數(shù)的作用有了比較詳細(xì)的介紹���,在這里我們只講一下會(huì)產(chǎn)生疑惑的兩個(gè)參數(shù),也就是第一個(gè)和最后一個(gè)參數(shù)���。
第一個(gè)參數(shù)設(shè)置要配置的中斷號(hào)����。這里我們講解一下如何確定這個(gè)參數(shù)的值�����。已知實(shí)驗(yàn)要使用外部按鍵接GPIO觸發(fā)外部中斷�����,那么我們從按鍵看起。
RV-STAR的按鍵的電路原理圖如下:
可以看到����,按鍵接到了PA0引腳上。接下來我們查閱GD32VF103用戶手冊(cè)的第六章:中斷/事件控制器(EXTI)�����,發(fā)現(xiàn)PA0對(duì)應(yīng)的EXTI中斷源為0號(hào)��。
由此可知����,我們知道本次實(shí)驗(yàn)使用的GPIO引腳PA0對(duì)應(yīng)的是EXTI0����,所以這里是EXTI0中斷。所有可用的中斷號(hào)都在“IRQn_Type”枚舉當(dāng)中���,在gd32vf103.h文件當(dāng)中可以查看RV-STAR的所有中斷號(hào)���。可以看出���,從19號(hào)開始后面的都是外部中斷����,如果配置不同的中斷,需要修改此參數(shù)為對(duì)應(yīng)的中斷號(hào)���。
最后一個(gè)參數(shù)配置的是中斷處理函數(shù)��。直接來看的話���,雖然這里寫的是“NULL”,但是并不代表沒有中斷處理函數(shù)���。RV-STAR的中斷向量表是存儲(chǔ)在flash當(dāng)中的��,這就意味著運(yùn)行時(shí)不能直接修改其中的數(shù)據(jù)��,所以在不修改源碼的情況下���,RV-STAR不能通過這個(gè)參數(shù)修改中斷向量表。這里填寫任何函數(shù)�,都不會(huì)修改這個(gè)中斷號(hào)對(duì)應(yīng)的中斷處理函數(shù)的地址。所以這個(gè)參數(shù)寫“NULL”�,實(shí)際上還是使用中斷向量表里面的默認(rèn)函數(shù)。
后面的“EXTI0_IRQHandler”函數(shù)就是外部中斷0的默認(rèn)中斷處理函數(shù)。詳細(xì)的中斷向量表可以在startup_gd32vf103.S文件開頭部分查看�����,這里就不一一列舉�。
中斷處理函數(shù)介紹
知道了中斷處理函數(shù)是什么,我們?cè)倩氐絤ain.c當(dāng)中����,找到“EXTI0_IRQHandler”函數(shù)��,具體內(nèi)容如下:
[size=0.85em]void EXTI0_IRQHandler(void)
{
if (RESET != exti_interrupt_flag_get(WAKEUP_KEY_PIN)){
if(RESET == gd_rvstar_key_state_get(KEY_WAKEUP)){
/* toggle RED led */
gd_rvstar_led_toggle(LED3);
}
}
/* clear EXTI lines pending flag */
exti_interrupt_flag_clear(WAKEUP_KEY_PIN);
}
中斷處理函數(shù)中開始是按鍵去抖�。之后切換LED的狀態(tài),也就是由亮到滅或者由滅到亮�。最后一步是清除EXTI0的中斷等待標(biāo)志。
因?yàn)槭褂玫氖侵袛嗟姆窍蛄刻幚砟J?,所以在?zhí)行中斷處理函數(shù)前會(huì)跳轉(zhuǎn)到非向量中斷統(tǒng)一的中斷入口,保存上下文入棧�����,再跳轉(zhuǎn)至對(duì)應(yīng)的中斷處理函數(shù)中執(zhí)行里面的指令�,所以函數(shù)內(nèi)不需要手動(dòng)增加保存上下文和恢復(fù)上下文的操作。
完整實(shí)例
為了便于理解外部中斷程序��,我們以Nuclei Board Labs中exti_key_interrupt實(shí)驗(yàn)為實(shí)例,實(shí)際感受一下外部中斷的流程���。
新建一個(gè)RV-STAR的helloworld工程�����,具體步驟請(qǐng)參考往期內(nèi)容�。
打開Nuclei Board Labs中的exti_key_interrupt文件夾���,復(fù)制main.c的內(nèi)容替換之前新建的helloworld工程main.c的內(nèi)容�����。
工程運(yùn)行框圖如下:
在main函數(shù)當(dāng)中����,一開始是一系列的初始化內(nèi)容����,包括開發(fā)板初始化,外部中斷初始化和ECLIC初始化�。
開發(fā)板初始化(Board Config)包含開發(fā)板上LED3初始化和按鍵初始化。
外部中斷初始化(EXTI config)包含按鍵外部中斷初始化���,主要是GPIO的配置��。
ECLIC初始化(ECLIC config)是之前講的ECLIC初始化函數(shù)�。
以上初始化完成后,main函數(shù)執(zhí)行while(1)循環(huán)�����,等待中斷的到來�����。
當(dāng)按下PA0按鍵����,觸發(fā)外部中斷�����,進(jìn)入外部中斷處理函數(shù)當(dāng)中�����,按鍵彈起�����,執(zhí)行LED狀態(tài)轉(zhuǎn)換的功能,最后退出中斷處理函數(shù)�。
例子main函數(shù)代碼和對(duì)照介紹如下:[size=0.85em]int main(void)
{
int32_t returnCode;
/* Board Config */
gd_rvstar_led_init(LED3);
gd_rvstar_key_init(WAKEUP_KEY_GPIO_PORT,KEY_MODE_EXTI);
/* EXIT config */
key_exti_init();
/* ECLIC config */
returnCode = ECLIC_Register_IRQ(EXTI0_IRQn, ECLIC_NON_VECTOR_INTERRUPT,
ECLIC_LEVEL_TRIGGER, 1, 0, NULL);
/* Enable interrupts in general */
__enable_irq();
while(1);
return 0;
}
實(shí)際運(yùn)行
工程新建完畢,需要在Launchbar工具中切換使用openocd的debug配置��,如下圖:
點(diǎn)擊編譯工程���,再點(diǎn)擊Debug下拉框切換為Run���,點(diǎn)擊開始運(yùn)行。下載結(jié)束記得點(diǎn)擊關(guān)閉openocd����。
最終運(yùn)行效果如下:
每當(dāng)按鍵抬起,led的狀態(tài)切換一次���。
2025-10-31 07:39:46
?GPIO是通用輸入輸出接口(General Purpose Input Output)的簡(jiǎn)稱���,是微控制器最基本也是最常用的外設(shè),本期內(nèi)容將介紹GPIO的基本原理���,然后通過「點(diǎn)亮LED」與「按鍵控制LED」兩個(gè)小實(shí)驗(yàn)帶領(lǐng)大家了解GPIO基本輸出與輸入功能的使用方法�����。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
[size=14.6667px]NucleiStudio IDE 202102版
[size=14.6667px]或 PlatformIO IDE
硬件需求
RV-STAR開發(fā)板
GPIO基本原理
GPIO的全稱是通用輸入輸出接口(General Purpose Input/Output)���,是很多外設(shè)能夠正常工作的基礎(chǔ)�,MCU上除了一些特定功能的引腳(如電源引腳)外���,其他的引腳基本都可以作為GPIO來使用����。
GD32VF103的GPIO端口以“組”的形式工作�,命名方式為Px(x=A, B, C, D, E···),每組配置有16個(gè)引腳����。GPIO端口和其他的備用功能(AFs)共用引腳����,在特定的封裝下獲得最大的靈活性。
每個(gè)GPIO引腳都可以通過軟件配置為輸出(推挽或開漏)�、輸入、外設(shè)備用功能或者模擬模式�����。每個(gè)GPIO引腳都可以配置為上拉、下拉或浮空���。除模擬模式外���,所有的GPIO引腳都具備大電流驅(qū)動(dòng)能力。
(標(biāo)準(zhǔn)GPIO端口的基本結(jié)構(gòu))
GPIO具有下列特征:
輸入/輸出方向控制
施密特觸發(fā)器輸入功能使能控制
每個(gè)引腳都具有弱上拉/下拉功能
推挽/開漏輸出使能控制
置位/復(fù)位輸出使能
可編程觸發(fā)沿的外部中斷——使用EXTI配置寄存器
模擬輸入/輸出配置
備用功能輸入/輸出配置
端口鎖定配置
實(shí)驗(yàn)1:點(diǎn)亮LED
RVSTAR有一個(gè)板載的RGB LED���,通過PA1����、PA2���、PA3三個(gè)引腳控制LED_G�、LED_R�����、LED_B三個(gè)顏色��,通過原理圖可以得知:要點(diǎn)亮LED需要通過GPIO引腳輸出一個(gè)低電平�,當(dāng)然也可以通過輸出PWM控制三個(gè)顏色LED的亮度����,進(jìn)而組合產(chǎn)生不同的顏色��。
下面將通過實(shí)驗(yàn)點(diǎn)亮LED_G�����,并令其以2秒為間隔閃爍:
(RGB LED原理圖 - 1)
(RGB LED原理圖 - 2)
[size=14.6667px]首先參照之前的教程��,使用NucleiStudio IDE或PlatformIO IDE創(chuàng)建工程�,[size=14.6667px]在main.c文件內(nèi)編寫代碼如下:
/* 實(shí)驗(yàn)1:點(diǎn)亮LED */
#include "nuclei_sdk_hal.h"
void led_config();
void led_on();
void led_off();
int main(void)
{
// 首先對(duì)外設(shè)進(jìn)行初始化操作
led_config();
while (1)
{
led_on();// 點(diǎn)亮LED
delay_1ms(2000); // 延時(shí)2秒
led_off(); // 熄滅LED
delay_1ms(2000); // 延時(shí)2秒
}
}
void led_config()
{
// 使能GPIOA端口的外設(shè)時(shí)鐘
rcu_periph_clock_enable(RCU_GPIOA);
// 將PA1初始化為推挽輸出模式
gpio_init(GPIOA, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
}
void led_on()
{
// 將輸出引腳置位為0,輸出低電平����,燈亮
gpio_bit_reset(GPIOA, GPIO_PIN_1);
}
void led_off()
{
// 將輸出引腳置位為1,輸出高電平����,燈熄
gpio_bit_set(GPIOA, GPIO_PIN_1);
}
[size=14.6667px]然后將工程文件進(jìn)行編譯和上傳,將可以觀察到板載的綠色LED以2秒為間隔進(jìn)行閃爍���。[size=14.6667px]運(yùn)行結(jié)果如下:
實(shí)驗(yàn)2:按鍵控制LED
[size=14.6667px]實(shí)驗(yàn)1我們使用了GPIO的輸出功能點(diǎn)亮了LED,實(shí)驗(yàn)2將帶領(lǐng)大家[size=14.6667px]使用GPIO的輸入功能:[size=14.6667px]用RVSTAR的板載按鍵控制LED的亮和滅����,在使用它之前我們需要了解一點(diǎn)[size=14.6667px]按鍵消抖的知識(shí)����。
(按鍵的原理圖)
[size=14.6667px]RVSTAR有一個(gè)板載的按鍵����,連接到了MCU的PA1引腳上,按鍵沒按下時(shí)�����,PA1引腳通過一個(gè)下拉電阻接地���,處于低電平狀態(tài)�,按鍵按下時(shí)PA1引腳被拉高到3.3V����,處于高電平狀態(tài)。由于按鍵是機(jī)械結(jié)構(gòu)�,在按下和彈起的瞬間會(huì)產(chǎn)生抖動(dòng),即引腳上的電平狀態(tài)不會(huì)被立刻拉高或拉低到穩(wěn)定狀態(tài)����,因此[size=14.6667px]為了能夠準(zhǔn)確檢測(cè)用戶的按鍵操作[size=14.6667px]�����,往往需要通過一定的方法進(jìn)行[size=14.6667px]消抖處理[size=14.6667px]:
常用的按鍵消抖方法有硬件消抖和軟件消抖:硬件消抖是通過在按鍵兩端增加電容的方式實(shí)現(xiàn)的����,成本較高�����;而軟件消抖是在第一次檢測(cè)到電平變化后延時(shí)一定時(shí)間后再次檢測(cè)電平狀態(tài)���,如果檢測(cè)到仍處于按下時(shí)的電平狀態(tài)���,那么說明用戶進(jìn)行了完整的按鍵操作,這個(gè)延時(shí)時(shí)間跟具體的硬件有關(guān)�,經(jīng)測(cè)試,在RVSTAR的按鍵上大約需要是設(shè)置100毫秒的延時(shí)比較合適�。
使用NucleiStudio IDE或PlatformIO IDE創(chuàng)建工程,在main.c文件內(nèi)編寫代碼如下:
/* 實(shí)驗(yàn)2:按鍵控制LED */
#include "nuclei_sdk_hal.h"
void led_config();
void led_on();
void led_off();
void key_config();
bit_status key_get_status();
bit_status led_status = 0; // 用來記錄led的當(dāng)前狀態(tài)
int main(void)
{
led_config();
key_config();
led_off();
while (1)
{
// 第一次檢測(cè)按鍵按下
if(key_get_status() == SET)
{
// 軟件延時(shí)100ms用以消除抖動(dòng)
delay_1ms(100);
// 再次檢測(cè)按鍵是否按下
if(key_get_status() == SET)
{
switch (led_status)
{
case 0:
led_on();
break;
case 1:
led_off();
break;
default:
break;
}
led_status = !led_status; // 每次按鍵操作后切換led的狀態(tài)
}
}
}
}
void led_config()
{
// 打開GPIOA端口的外設(shè)時(shí)鐘
rcu_periph_clock_enable(RCU_GPIOA);
// 將PA1初始化為推挽輸出模式
gpio_init(GPIOA, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
}
void led_on()
{
// 將輸出引腳置位為0����,輸出低電平���,燈亮
gpio_bit_reset(GPIOA, GPIO_PIN_1);
}
void led_off()
{
// 將輸出引腳置位為1����,輸出高電平,燈熄
gpio_bit_set(GPIOA, GPIO_PIN_1);
}
void key_config()
{
rcu_periph_clock_enable(RCU_GPIOA); // 開啟外設(shè)時(shí)鐘
rcu_periph_clock_enable(RCU_AF); // 開啟復(fù)用時(shí)鐘
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_0); // 將PA0初始化為浮空輸入模式
}
bit_status key_get_status()
{
// 獲得輸入引腳的狀態(tài)��,其中bit_status是一個(gè)固件庫(kù)定義的枚舉類型
return gpio_input_bit_get(GPIOA, GPIO_PIN_0);
}
[size=14.6667px]然后將工程文件進(jìn)行編譯和上傳�����,將可以觀察到:上電后LED不亮�,每次按下按鍵后LED的狀態(tài)會(huì)發(fā)生切換。
運(yùn)行結(jié)果如下:
實(shí)驗(yàn)完整資料
實(shí)驗(yàn)源碼:https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/gpio
原理圖:
https://www.rvmcu.com/quickstart-doc-u-pdf-id-235.html
2025-10-31 07:16:40
PWM(脈沖寬度調(diào)制)可用于電機(jī)的調(diào)速��、LED的亮度調(diào)節(jié)�����、無源蜂鳴器輸出音調(diào)等����,是嵌入式系統(tǒng)開發(fā)中經(jīng)常采用的方法。本期內(nèi)容以一個(gè)用無源蜂鳴器播放音樂的例子����,帶領(lǐng)大家了解使用定時(shí)器PWM輸出功能的方法�。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
NucleiStudio IDE 202102版
或 PlatformIO IDE
硬件需求
RV-STAR開發(fā)板
無源蜂鳴器
脈沖寬度調(diào)制
脈沖寬度調(diào)制(Pulse Width Modulation���,PWM)是利用微控制器的數(shù)字輸出來對(duì)模擬電路進(jìn)行控制的一種非常有效的技術(shù)���。
PWM的控制方式就是對(duì)逆變電路開關(guān)器件的通斷進(jìn)行控制,使輸出端得到一系列幅值相等的脈沖���,用這些脈沖來代替正弦波或所需要的波形���。也就是在輸出波形的半個(gè)周期中產(chǎn)生多個(gè)脈沖,使各脈沖的等值電壓為正弦波形�����,所獲得的輸出平滑且低次諧波少�。按一定的規(guī)則對(duì)各脈沖的寬度進(jìn)行調(diào)制,既可改變逆變電路輸出電壓的大小���,也可改變輸出頻率�。其中��,一個(gè)周期內(nèi)脈沖時(shí)間占總時(shí)間的比值稱為占空比。
簡(jiǎn)言之����,如果你想讓電機(jī)的速度變慢或者控制的LED變暗,只需降低PWM的占空比����,這使得原本需要控制模擬電壓或電流才能達(dá)到的效果�����,通過數(shù)字方式也能夠?qū)崿F(xiàn)����,這樣可以大幅度降低系統(tǒng)的成本和功耗。
無源蜂鳴器
無源蜂鳴器是很常見的一個(gè)電子元件��,相信讀者朋友們都見過可以播放生日歌的電子蠟燭�����,那個(gè)就是靠無源蜂鳴器來播放的�。無源蜂鳴器的內(nèi)部不帶振蕩源,通過使用50%占空比�����、頻率500Hz~4.5kHz的PWM驅(qū)動(dòng),就可以播放出不同音調(diào)的聲音���。
GD32VF103的定時(shí)器
GD32VF103的定時(shí)器分為三種類型���,分別是基本定時(shí)器、通用定時(shí)器和高級(jí)定時(shí)器��,其中普通定時(shí)器和高級(jí)定時(shí)器都支持PWM輸出功能���,在本次的實(shí)驗(yàn)中使用TIMER2(普通定時(shí)器)來進(jìn)行PWM輸出實(shí)驗(yàn)����。
實(shí)驗(yàn)部分
首先通過NucleiStudio或者PlatformIO等開發(fā)工具創(chuàng)建工程���,然后在工程目錄中添加“tone.h”和“main.c”文件��,然后開始進(jìn)行代碼的編寫��。
首先���,我們要為蜂鳴器發(fā)出的不同音調(diào)所需要的頻率進(jìn)行預(yù)先的定義�,以下的經(jīng)調(diào)音測(cè)試后的D調(diào)的不同音符所對(duì)應(yīng)的頻率�����,直接復(fù)制到“tone.h”中即可:
[size=0.85em]#define NTD0 -1
#define NTD1 293
#define NTD2 329
#define NTD3 368
#define NTD4 390
#define NTD5 438
#define NTD6 492
#define NTD7 554
#define NTDL1 147
#define NTDL2 166
#define NTDL3 185
#define NTDL4 196
#define NTDL5 221
#define NTDL6 248
#define NTDL7 278
#define NTDH1 585
#define NTDH2 657
#define NTDH3 700
#define NTDH4 781
#define NTDH5 882
#define NTDH6 990
#define NTDH7 1112
然后����,在“main.c”中,我們要實(shí)現(xiàn)三個(gè)函數(shù):
buzzer_init() -- 初始化蜂鳴器
buzzer_on(int freq) -- 蜂鳴器根據(jù)頻率發(fā)聲
buzzer_off() -- 關(guān)閉蜂鳴器
下面依次進(jìn)行講解���,首先是buzzer_init(),我們使用的是PB1引腳�,它對(duì)應(yīng)著TIMER2的CH3通道,要依次使能端口時(shí)鐘����、復(fù)用時(shí)鐘、定時(shí)器時(shí)鐘����,然后把引腳初始化為推挽輸出模式。
[size=0.85em]void buzzer_init()
{
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_AF);
rcu_periph_clock_enable(RCU_TIMER2);
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
}
然后是buzzer_on(int freq)����,它接收不同的頻率參數(shù)�����,對(duì)定時(shí)器進(jìn)行配置,輸出50%占空比的不同頻率的PWM波����,進(jìn)而控制蜂鳴器發(fā)聲。實(shí)現(xiàn)方法參考下方代碼�����,其中要注意的是預(yù)分頻系數(shù)�、周期以及PWM輸出的占空比等幾個(gè)參數(shù)的配置。
[size=0.85em]void buzzer_on(int freq)
{
timer_oc_parameter_struct timer_ocinitpara;
timer_parameter_struct timer_initpara;
timer_deinit(TIMER2);
/* initialize TIMER init parameter struct */
timer_struct_para_init(&timer_initpara);
/* TIMER2 configuration */
timer_initpara.prescaler = 107;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 1000000 / freq;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER2, &timer_initpara);
/* initialize TIMER channel output parameter struct */
timer_channel_output_struct_para_init(&timer_ocinitpara);
/* CH3 configuration in PWM mode */
timer_ocinitpara.outputstate = TIMER_CCX_ENABLE;
timer_ocinitpara.outputnstate = TIMER_CCXN_DISABLE;
timer_ocinitpara.ocpolarity = TIMER_OC_POLARITY_HIGH;
timer_ocinitpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;
timer_ocinitpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_ocinitpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW;
timer_channel_output_config(TIMER2, TIMER_CH_3, &timer_ocinitpara);
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER2);
timer_enable(TIMER2);
/* CH3 configuration in PWM mode1,duty cycle 50% */
timer_channel_output_pulse_value_config(TIMER2, TIMER_CH_3, 500000 / freq);
timer_channel_output_mode_config(TIMER2, TIMER_CH_3, TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER2, TIMER_CH_3, TIMER_OC_SHADOW_DISABLE);
}
第三個(gè)函數(shù)buzzer_off()���,這個(gè)比較簡(jiǎn)單�����,只需復(fù)位定時(shí)器即可�����。
[size=0.85em]void buzzer_off()
{
timer_deinit(TIMER2);
}
最后需要用兩個(gè)數(shù)組分別存儲(chǔ)一段音樂的音符���、節(jié)拍�,這里以“小星星”的前16拍為例�,然后在主循環(huán)中對(duì)這兩個(gè)數(shù)組進(jìn)行遍歷,就可以實(shí)現(xiàn)播放音樂的效果���。
[size=0.85em]int notes[] = {
NTD1, NTD1, NTD5, NTD5,
NTD6, NTD6, NTD5,
NTD4, NTD4, NTD3, NTD3,
NTD2, NTD2, NTD1
};
int beats[] = {
1, 1, 1, 1,
1, 1, 2,
1, 1, 1, 1,
1, 1, 2
};
int main()
{
buzzer_init();
int length = sizeof(notes) / sizeof(notes[0]);
while (1) {
for (int i = 0; i < length; i++) {
buzzer_on(notes);
delay_1ms(500 * beats);
buzzer_off();
}
delay_1ms(1000);
}
}
完成代碼編寫后��,將無源蜂鳴器的(+)引腳接到RV-STAR開發(fā)板的PB5引腳上���,另一個(gè)引腳接地,然后編譯�、上傳,就可以聽到蜂鳴器播放“小星星”啦~
實(shí)驗(yàn)源碼https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/timer/timer_pwmout_buzzer
2025-10-31 06:38:13
面對(duì)復(fù)雜多樣的嵌入式通信需求�,Air8000 模塊的 CAN 接口開發(fā)尤為重要����。本文以實(shí)戰(zhàn)為導(dǎo)向,詳細(xì)拆解 Air8000 模塊 CAN 接口的開發(fā)流程與配置方法�,從環(huán)境搭建到代碼實(shí)現(xiàn),再到實(shí)際測(cè)試�,讓你零基礎(chǔ)也能輕松掌握,實(shí)現(xiàn)高效��、穩(wěn)定的數(shù)據(jù)通信。 ? 一���、CAN 概述 ? 控制器局域網(wǎng)(Controller Area Network�����,CAN)是一種廣泛應(yīng)用于工業(yè)控制�����、汽車電子等領(lǐng)域的實(shí)時(shí)通信協(xié)議�,由德國(guó)博世公司于 1986 年提出并標(biāo)準(zhǔn)化(ISO 11898)��。其核心采用多主(Multi-Master)總線架構(gòu)
2025-10-29 14:04:55256 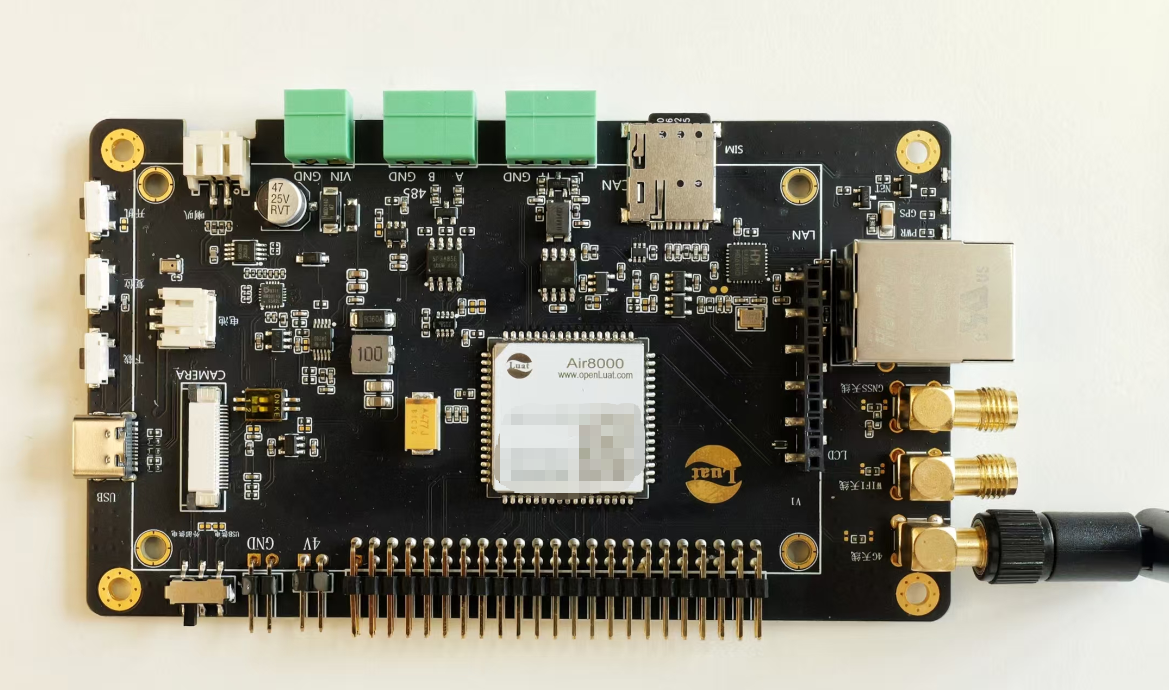
?ADC(Analog to Digital Converter��,模數(shù)轉(zhuǎn)換器)是指將連續(xù)變化的模擬信號(hào)轉(zhuǎn)換為離散的數(shù)字信號(hào)的電子器件��。ADC可以將真實(shí)世界的模擬信號(hào)����,例如溫度、壓力���、聲音等����,轉(zhuǎn)換成更容易儲(chǔ)存、處理和發(fā)射的數(shù)字形式����,因此被廣泛應(yīng)用在各種產(chǎn)品中。本期我們將通過一個(gè)讀取電位器電壓值的小實(shí)驗(yàn)來了解RV-STAR開發(fā)板上ADC的使用方法���。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
NucleiStudio IDE 202102版或 PlatformIO IDE
硬件需求
RV-STAR開發(fā)板
旋轉(zhuǎn)電位器
GD32VF103的ADC外設(shè)
GD32VF103包含一個(gè)12位精度的ADC��,它是一種采用逐次逼近方式的模擬數(shù)字轉(zhuǎn)換器��,它有18個(gè)多路復(fù)用通道�����,可以轉(zhuǎn)換來自16個(gè)外部通道和2個(gè)內(nèi)部通道的模擬信號(hào)����。模擬看門狗允許應(yīng)用程序來檢測(cè)輸入電壓是否超出用戶設(shè)定的高低閾值���。各種通道的A/D轉(zhuǎn)換可以配置成單次、連續(xù)、掃描或間斷轉(zhuǎn)換模式�。ADC轉(zhuǎn)換的結(jié)果可以按照左對(duì)齊或右對(duì)齊的方式存儲(chǔ)再16位寄存器中。片上的硬件過采樣機(jī)制可以通過減少來自MCU的相關(guān)計(jì)算負(fù)擔(dān)來提高性能�����。
高性能:
?可配置12位�、10位、8位����、或者6位分辨率;
自校準(zhǔn)�����;
可編程采樣時(shí)間�����;
數(shù)據(jù)寄存器可配置數(shù)據(jù)對(duì)齊方式��;
支持規(guī)則數(shù)據(jù)轉(zhuǎn)換的DMA請(qǐng)求�。
模擬輸入通道:
16個(gè)外部模擬輸入通道;
1個(gè)內(nèi)部溫度傳感通道(VSENSE)���;
1個(gè)內(nèi)部參考電壓輸入通道(VREFINT)�。
轉(zhuǎn)換開始的發(fā)起:
軟件;
硬件觸發(fā)�����。
轉(zhuǎn)換模式:
轉(zhuǎn)換單個(gè)通道�����,或者掃描一序列的通道�����;
單次模式���,每次觸發(fā)轉(zhuǎn)換一次選擇的輸入通道��;
連續(xù)模式����,連續(xù)轉(zhuǎn)換所選擇的輸入通道�;
間斷模式;
同步模式(適用于具有兩個(gè)或多個(gè)ADC的設(shè)備)��。
模擬看門狗��。
中斷的產(chǎn)生:
規(guī)則組或注入組轉(zhuǎn)換結(jié)束���;
模擬看門狗事件���。
過采樣:
16位的數(shù)據(jù)寄存器;
可調(diào)整的過采樣率����,從2x到256x;
高達(dá)8位的可編程數(shù)據(jù)移位���。
ADC供電要求:2.6V到3.6V���,一般電源電壓為3.3V。
ADC輸入范圍:VREF- ≤VIN ≤VREF+��。
實(shí)驗(yàn)部分
本次實(shí)驗(yàn)使用的外設(shè)部件為旋轉(zhuǎn)電位器��,它是一個(gè)典型的模擬器件���,通過旋轉(zhuǎn)旋鈕可以輸出0到供電電壓VCC之間的模擬量。
通過查閱電路原理圖得知����,RV-STAR的PC0引腳對(duì)應(yīng)著一個(gè)ADC復(fù)用通道�,我們使用它來連接旋轉(zhuǎn)電位器外設(shè)�,連線參考如下表:
RV-STAR旋轉(zhuǎn)編碼器
PC0OUT
3V3VCC
GNDGND
旋轉(zhuǎn)編碼器的供電一定要接3V3不能接5V,否則可能因?yàn)檩斎腚妷哼^高而燒壞芯片����。
完成電路連線之后就可以創(chuàng)建工程開始編寫代碼了��,首先需要定義一系列的配置函數(shù)����,用于初始化時(shí)鐘、外設(shè)引腳和進(jìn)行ADC的配置:
void rcu_config(void)
{
rcu_periph_clock_enable(RCU_GPIOC);
rcu_periph_clock_enable(RCU_ADC1);
rcu_adc_clock_config(RCU_CKADC_CKAPB2_DIV8);
}
void gpio_config(void)
{
gpio_init(GPIOC, GPIO_MODE_AIN, GPIO_OSPEED_50MHZ, GPIO_PIN_0);
}
void adc_config(void)
{
/* reset ADC */
adc_deinit(ADC1);
/* ADC mode config */
adc_mode_config(ADC1, ADC_MODE_FREE);
/* ADC scan function enable */
adc_special_function_config(ADC1, ADC_SCAN_MODE, ENABLE);
/* ADC contineous function enable */
adc_special_function_config(ADC1, ADC_CONTINUOUS_MODE, ENABLE);
/* ADC data alignment config */
adc_data_alignment_config(ADC1, ADC_DATAALIGN_RIGHT);
/* ADC channel length config */
adc_channel_length_config(ADC1, ADC_REGULAR_CHANNEL, 1);
adc_external_trigger_source_config(ADC1, ADC_REGULAR_CHANNEL, ADC0_1_EXTTRIG_REGULAR_NONE);
adc_external_trigger_config(ADC1, ADC_REGULAR_CHANNEL, ENABLE);
delay_1ms(1);
adc_enable(ADC1);
adc_calibration_enable(ADC1);
adc_software_trigger_enable(ADC1, ADC_REGULAR_CHANNEL);
adc_regular_channel_config(ADC1, 0, ADC_CHANNEL_10, ADC_SAMPLETIME_55POINT5);
}
其中�����,我們使用的PC0管腳對(duì)應(yīng)著ADC1的通道10���,編寫配置函數(shù)的時(shí)候要注意��,另外在本應(yīng)用中,ADC被配置為獨(dú)立的連續(xù)掃描模式���,使用常規(guī)通道觸發(fā)(即軟件觸發(fā))�。
在主函數(shù)中�,周期性的讀取ADC的值,然后打印到串口終端�,對(duì)應(yīng)的代碼如下:
#include "nuclei_sdk_hal.h"
#include
void rcu_config(void);
void gpio_config(void);
void adc_config(void);
uint16_t adc_value;
int main(void)
{
rcu_config();
gpio_config();
adc_config();
gd_com_init(GD32_COM0);
while (1) {
delay_1ms(1000);
adc_value = adc_regular_data_read(ADC1);
printf("rn ADC1 regular channel 10 data = %d rn", adc_value);
printf("rn ***********************************rn");
}
}
以上就是完整的代碼內(nèi)容,完成后���,將RV-STAR開發(fā)板連接到電腦���,編譯并上傳代碼,打開串口終端�����,旋轉(zhuǎn)電位器旋鈕��,可以觀察到打印到串口終端的讀數(shù)發(fā)生了改變�����,說明ADC功能正常開啟。
實(shí)驗(yàn)源碼:https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/adc/adc_regular_scan
2025-10-29 06:56:24
本文將分享我們團(tuán)隊(duì)提高E203軟核主頻的辦法���。
查閱芯來科技官方出版的《手把手教你設(shè)計(jì)CPU——RISC-V處理器篇》教材�����,我們發(fā)現(xiàn)����,原本設(shè)計(jì)的E203主時(shí)鐘域應(yīng)該是100MHZ
2025-10-29 06:19:19
看門狗定時(shí)器(Watch Dog Timer���,WDT或WDGT)�����,是一種微控制器為了防止程序“跑飛”而設(shè)計(jì)的一種硬件機(jī)制��,讓系統(tǒng)在因電磁干擾或者軟件錯(cuò)誤而當(dāng)機(jī)的時(shí)候可以復(fù)位系統(tǒng)���,從而具備自修復(fù)的能力。本期內(nèi)容將帶領(lǐng)大家了解看門狗的基本原理和RV-STAR的獨(dú)立看門狗(FWDGT)的使用方法。
系統(tǒng)環(huán)境
Windows 10-64bit
軟件平臺(tái)
NucleiStudio IDE 202102版或 PlatformIO IDE
硬件需求
RV-STAR開發(fā)板
看門狗定時(shí)器的基本原理
看門狗定時(shí)器實(shí)際上一個(gè)計(jì)數(shù)器��,在計(jì)數(shù)溢出時(shí)會(huì)產(chǎn)生一個(gè)復(fù)位信號(hào)��,正常情況下首先給看門狗定時(shí)器設(shè)置一個(gè)超時(shí)時(shí)間���,然后程序在超時(shí)時(shí)間內(nèi)定期對(duì)定時(shí)器進(jìn)行重載操作(也叫做“喂狗”操作)��,從而避免正常程序發(fā)生復(fù)位。
當(dāng)系統(tǒng)發(fā)生意料之外的故障使得軟件跑飛����,看門狗定時(shí)器無法被按時(shí)重載時(shí),看門狗硬件就會(huì)產(chǎn)生一個(gè)系統(tǒng)復(fù)位�,讓系統(tǒng)重新運(yùn)行,從而達(dá)到恢復(fù)功能的效果��。
GD32VF103的獨(dú)立看門狗定時(shí)器(FWDGT)
獨(dú)立看門狗定時(shí)器(FWDGT)具有獨(dú)立的時(shí)鐘源(IRC40K)���。因此就算主時(shí)鐘失效的�,它仍然能保持工作狀態(tài)��,這適用于需要獨(dú)立環(huán)境且對(duì)計(jì)時(shí)精度要求不高的場(chǎng)合�。
當(dāng)內(nèi)部向下計(jì)數(shù)器的值達(dá)到0,獨(dú)立看門狗會(huì)產(chǎn)生一個(gè)復(fù)位��。使能獨(dú)立看門狗的寄存器寫保護(hù)功能可以避免寄存器的值被意外的配置篡改。
主要特性:
自由運(yùn)行的12位向下計(jì)數(shù)器
如果看門狗定時(shí)器被使能�����,那么當(dāng)向下計(jì)數(shù)器的值達(dá)到0時(shí)產(chǎn)生系統(tǒng)復(fù)位��;
獨(dú)立時(shí)鐘源��,獨(dú)立看門狗定時(shí)器在主時(shí)鐘故障時(shí)仍能工作���;
獨(dú)立看門狗定時(shí)器硬件控制位���,可以用來控制是否在上電時(shí)自動(dòng)啟動(dòng)看門狗定時(shí)器;
可以配置獨(dú)立看門狗定時(shí)器在調(diào)試模式下選擇停止還是繼續(xù)工作�。
實(shí)驗(yàn)部分
FWDGT實(shí)驗(yàn)的思路如下:
首先對(duì)系統(tǒng)進(jìn)行初始化操作,然后讓紅色的LED點(diǎn)亮50ms(用于指示系統(tǒng)發(fā)生了復(fù)位)��,接著將FWDGT的超時(shí)時(shí)間設(shè)置為1000ms(非精確)�����,然后在主函數(shù)中每間隔900ms做一次FWDGT計(jì)數(shù)器重載防止其復(fù)位���,并且用綠色LED狀態(tài)切換表示程序正在運(yùn)行(FWDGT沒有復(fù)位)��。
同時(shí)用KEY_WKUP按鍵連線的中斷線來模擬一個(gè)軟件故障��,當(dāng)該按鍵被按下時(shí)觸發(fā)中斷服務(wù)����,在該中斷服務(wù)程序中寫入一個(gè)點(diǎn)亮藍(lán)色LED并進(jìn)入while(1)的死循環(huán)來模擬軟件跑飛,不能返回主程序�����。這樣FWDGT計(jì)數(shù)器不能及時(shí)被重載���,當(dāng)計(jì)數(shù)值到0時(shí),發(fā)生FWDGT復(fù)位�,在系統(tǒng)復(fù)位后,通過點(diǎn)亮紅色LED來指示FWDGT發(fā)生��。
完整的實(shí)現(xiàn)代碼如下:
#include "nuclei_sdk_hal.h"
uint32_t millis(void);
uint32_t start = 0;
uint32_t now = 0;
int main()
{
/* enable IRC40K */
rcu_osci_on(RCU_IRC40K);
/* wait till IRC40K is ready */
while (SUCCESS != rcu_osci_stab_wait(RCU_IRC40K)) ;
/* confiure FWDGT counter clock: 40KHz(IRC40K) / 64 = 0.625 KHz */
fwdgt_config(625, FWDGT_PSC_DIV64);
/* after 1 seconds to generate a reset */
fwdgt_enable();
gd_rvstar_led_init(LED1);
gd_rvstar_led_init(LED2);
gd_rvstar_led_init(LED3);
gd_rvstar_led_on(LED3);
delay_1ms(50);
gd_rvstar_led_off(LED3);
start = millis();
gd_rvstar_key_init(KEY_WAKEUP, KEY_MODE_EXTI);
__enable_irq();
while (1) {
now = millis();
if (now - start >= 900) {
fwdgt_counter_reload();
start = now;
}
/* toggle green led */
gd_rvstar_led_toggle(LED1);
delay_1ms(100);
}
}
void EXTI0_IRQHandler(void)
{
if (RESET != exti_interrupt_flag_get(WAKEUP_KEY_EXTI_LINE)) {
if (RESET == gd_rvstar_key_state_get(KEY_WAKEUP)) {
gd_rvstar_led_off(LED1);
gd_rvstar_led_on(LED2);
while (1);
}
}
/* clear EXTI lines pending flag */
exti_interrupt_flag_clear(WAKEUP_KEY_EXTI_LINE);
}
/**
* brief Returns the number of milliseconds since the board began running the current program.
*
* return Number of milliseconds since the program started (uint32_t)
*/
uint32_t millis(void)
{
return (uint32_t)(SysTimer_GetLoadValue() * (4000.F / SystemCoreClock));
}
在IDE中創(chuàng)建工程��,將上述代碼編譯上傳到開發(fā)板�,可以觀察到,開發(fā)板的板載LED短暫閃了下紅色后�,開始進(jìn)入持續(xù)的綠色快速閃爍狀態(tài),當(dāng)按下WKUP按鍵后,LED開始亮藍(lán)色����,持續(xù)不到1s后,又閃了下紅色后然后進(jìn)入持續(xù)的綠色快速閃爍狀態(tài)��,說明看門狗起到了作用使系統(tǒng)發(fā)生了復(fù)位�����。?
實(shí)驗(yàn)源碼:
https://github.com/Nuclei-Software/nuclei-board-labs/tree/master/rvstar/wdgt/fwdgt_key_int
2025-10-29 06:01:39
前言:在嵌入式開發(fā)中,一個(gè)小小的接口問題往往會(huì)卡殼半天����,尤其是像HDMI熱插拔這種和硬件、內(nèi)核驅(qū)動(dòng)都掛鉤的場(chǎng)景���。最近調(diào)試T527板卡時(shí)����,就遇到了HDMI熱插拔失靈的麻煩�,經(jīng)過一番排查終于解決,今天把整個(gè)過程整理成筆記�,希望能幫到有同樣困擾的朋友���。一、明確HDMI“失效”現(xiàn)象在開始排查前�,得先把問題現(xiàn)象摸透。這次遇到的HDMI問題主要集中在“插拔檢測(cè)”上�,具體
2025-10-17 08:32:25994 
在 BUCK 電源設(shè)計(jì)中,MOS 管的 “快開快關(guān)” 是減少損耗的關(guān)鍵����,而實(shí)現(xiàn)這一需求的核心,離不開前級(jí)驅(qū)動(dòng)與滯回比較器的精妙配合�����。今天我們就從電路搭建到參數(shù)計(jì)算��,手把手教你搞定 BUCK 電源的滯回電路��,即使是新手也能跟著一步步實(shí)操�!
2025-10-16 11:03:332364 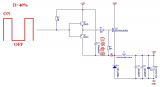
本開發(fā)指南將手把手幫工程師們了解芯片的各個(gè)模塊�,對(duì)照手冊(cè)熟悉各個(gè)模塊的寄存器配置。同時(shí)�,分享一些常見的錯(cuò)誤用法,助您規(guī)避誤區(qū)����,從而提高開發(fā)效率�����。
2025-10-07 09:15:00858 
以下文章內(nèi)容由CW32生態(tài)社區(qū)用戶End提供: https://gitee.com/xcet/embedded-cw32-board-template/tree/master/ref/CW32-GCC-Clion-Template 最近 CLion 對(duì)非商業(yè)用途免費(fèi)了��,我立馬下載了最新的CLion2025�,現(xiàn)在針國(guó)產(chǎn)武漢芯源半導(dǎo)體的 CW32單片機(jī) 搭建CLion+GCC+ CMake 開發(fā)環(huán)境����。 CLion是一款由JetBrains開發(fā)的跨平臺(tái)集成開發(fā)環(huán)境(IDE),專門為C和C++設(shè)計(jì)�����。以其智能編碼輔助��、易用的項(xiàng)目管理和強(qiáng)大的內(nèi)置工具(如調(diào)試器��、靜態(tài)分析工具��、單元測(cè)試框架)而著稱����,支持遠(yuǎn)程協(xié)作和嵌入式開發(fā)
2025-09-29 18:00:316699 
BLE藍(lán)牙配網(wǎng)如何兼顧便捷性與穩(wěn)定性���?STA+SoftAP雙模式給出最優(yōu)解。下面從技術(shù)原理到實(shí)戰(zhàn)案例�����,手把手教你搭建雙模式配網(wǎng)系統(tǒng)�����,無需復(fù)雜代碼�����,輕松實(shí)現(xiàn)設(shè)備快速聯(lián)網(wǎng)�,小白也能秒變專家。
2025-09-20 15:20:431307 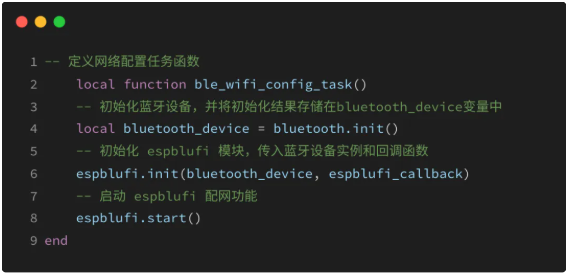
一��、IO調(diào)試方法使用組態(tài)軟件在線數(shù)據(jù)監(jiān)控功能進(jìn)行第三方ProfinetIO或Profinet網(wǎng)關(guān)調(diào)試���,通過西門子(STEP7-MicroWINSMART�����、TIAPortal)和Codesys進(jìn)行調(diào)試驗(yàn)證�。1.1STEP7-MicroWINSMART平臺(tái)在使用STEP7-MicroWINSMART平臺(tái)調(diào)試ProfinetIO時(shí)���,需先借助S7-200PLC才可進(jìn)
2025-09-18 19:33:001657 ���,我們就整理了一版超詳細(xì)的手把手開發(fā)教程���,從架構(gòu)解析、代碼實(shí)戰(zhàn)�,到知識(shí)庫(kù)配置與智能體調(diào)試,流程完善�����、操作門檻低!大家也可以根據(jù)實(shí)際場(chǎng)景需求����,大膽發(fā)揮想象,自定義開
2025-09-12 17:40:071702 
H100服務(wù)器停工一天損失的算力成本可能比維修費(fèi)還高����。今天,我們給大家總結(jié)一套“防掉卡秘籍”,從日常管理到環(huán)境把控�,手把手教你把掉卡風(fēng)險(xiǎn)壓到最低。一、供電是“生命線”�,這3點(diǎn)必須盯緊H100滿載功耗
2025-09-05 11:03:06855 
我司產(chǎn)品ECAN-E02擁有MQTT工作模式����,在此工作模式下����,可以選擇使用阿里云平臺(tái)進(jìn)行相關(guān)測(cè)試與通信。1MQTT工作模式概述首先讓我們了解一下什么是MQTT工作模式���。MQTT(MessageQueuingTelemetryTransport)是一種輕量級(jí)的消息傳輸協(xié)議,特別適用于物聯(lián)網(wǎng)(IoT)和資源受限的環(huán)境���。相較于傳統(tǒng)的請(qǐng)求-響應(yīng)模式���,發(fā)布-訂閱(Pu
2025-09-04 19:34:201214 無論你的技術(shù)背景如何�,本教程都將以手把手的方式,拆解AT指令A(yù)PN設(shè)置的全流程���。專網(wǎng)連接不再是門檻�����,即刻開啟自主配置之旅��! APN是設(shè)備連接到運(yùn)營(yíng)商網(wǎng)絡(luò)的“身份證” ——當(dāng)設(shè)備插入SIM卡并注冊(cè)到
2025-09-04 14:40:47875 
我們正在參加全球電子成就獎(jiǎng)的評(píng)選�,歡迎大家?guī)臀覀兺镀薄x謝支持來源:內(nèi)容由半導(dǎo)體行業(yè)觀察編譯自semiengineeringChiplet是一種滿足持續(xù)增長(zhǎng)的計(jì)算能力和I/O帶寬需求的方法��,它將SoC功能拆分成更小的異構(gòu)或同構(gòu)芯片(稱為芯片集)�����,并將這些Chiplet集成到單個(gè)系統(tǒng)級(jí)封裝(SIP)中,其中總硅片尺寸可能超過單個(gè)SoC的光罩尺寸。SIP不僅
2025-09-04 11:51:37643 
宏集MC系列模塊化控制器是基于RaspberryPi的高性能4核控制器����,運(yùn)動(dòng)控制循環(huán)時(shí)間最快可達(dá)500微秒��,實(shí)現(xiàn)了計(jì)算能力和成本之間的最佳平衡,適用于多軸運(yùn)動(dòng)控制和CNC控制�����。教程目的本系列教程將使用宏集MC系列控制器�,詳細(xì)介紹通過CODESYSV3來進(jìn)行PLC測(cè)試編程的步驟,旨在使初次接觸宏集MC系列控制器的使用者了解該板卡的連接�����、配置��、調(diào)試���。通過該教程的
2025-08-26 17:31:251030 
在云原生時(shí)代,存儲(chǔ)是制約應(yīng)用性能的關(guān)鍵瓶頸���。本文將帶你深入理解K8s存儲(chǔ)類的設(shè)計(jì)原理����,并手把手實(shí)現(xiàn)與Ceph的完美集成�,讓你的集群存儲(chǔ)性能提升300%���!
2025-08-22 11:50:09698 車載以太網(wǎng)時(shí)間同步精度不足?gPTP協(xié)議實(shí)現(xiàn)±50ns級(jí)同步革命�����!本文深度剖析gPTP協(xié)議在自動(dòng)駕駛多傳感器融合中的關(guān)鍵作用�����,從硬件選型到LinuxPTP工具鏈配置�����,手把手教你搭建高精度時(shí)間同步系統(tǒng)�!
2025-08-20 11:39:262024 
ISO 26262合規(guī)指南,從ASIL分級(jí)到工具落地�����,手把手教你用靜態(tài)代碼分析(Perforce QAC)實(shí)現(xiàn)高效合規(guī)���。
2025-08-07 17:33:55970 
認(rèn)識(shí)頻率漂移 一 ���、 頻率漂移的概念 頻率漂移�����,簡(jiǎn)單來說�,就是晶振實(shí)際輸出頻率和標(biāo)稱頻率之間出現(xiàn)了偏差����。就好比你買了一個(gè)標(biāo)稱每分鐘擺動(dòng)60次的擺鐘,但實(shí)際使用時(shí)�,它每分鐘可能擺動(dòng)61次或者59次,這多出來或者少掉的擺動(dòng)次數(shù)�����,就類似于晶振的頻率漂移�。在電子設(shè)備中�,晶振就如同一個(gè)精準(zhǔn)的時(shí)鐘,為整個(gè)系統(tǒng)提供穩(wěn)定的頻率信號(hào)�,一旦出現(xiàn)頻率漂移,就相當(dāng)于這個(gè)時(shí)鐘走不準(zhǔn)了��。 二 �、 漂移帶來的嚴(yán)重后果 別小看這小小的頻率漂移����,它可
2025-07-25 16:36:22544 E104-BT01是成都億佰特電子科技有限公司基于德州儀器(TI)CC2541射頻芯片研發(fā)的符合藍(lán)牙協(xié)議5.0的模塊�����,該模塊主從一體���,可實(shí)現(xiàn)模塊點(diǎn)對(duì)點(diǎn)間的藍(lán)牙連接����,實(shí)現(xiàn)模塊間數(shù)據(jù)透?jìng)?,支持串口指令配置模塊參數(shù)和功能。廣泛應(yīng)用于智能穿戴�����、家庭自動(dòng)化���、家庭安防�、個(gè)人保健����、智能家電����、配飾與遙控器���、汽車��、照明��、工業(yè)互聯(lián)網(wǎng)��、智能數(shù)據(jù)采集�����、智能控制等領(lǐng)域���。本文將通過模塊
2025-07-24 19:33:331399 在現(xiàn)代工業(yè)自動(dòng)化控制領(lǐng)域,實(shí)現(xiàn)PLC無線控制可以帶來更高的靈活度和便利性���。PLC可以配備無線通訊模塊���,這些模塊可以直接與PLC連接�����,能夠與觸摸屏或上位機(jī)等其他設(shè)備或系統(tǒng)進(jìn)行無線通信����,實(shí)現(xiàn)數(shù)據(jù)的傳輸和控制命令的發(fā)送���。 PLC無線控制模塊采用全數(shù)字加密無線傳輸技術(shù)���,應(yīng)用范圍覆蓋冶煉�����、化工�����、新能源、石油等16大工業(yè)行業(yè),在復(fù)雜惡劣環(huán)境中平均連續(xù)使用壽命超過8年����。以下是兩例無線通訊模塊在工業(yè)現(xiàn)場(chǎng)實(shí)現(xiàn)PLC無線控制的典型應(yīng)用: 一��、無
2025-07-24 17:07:27414 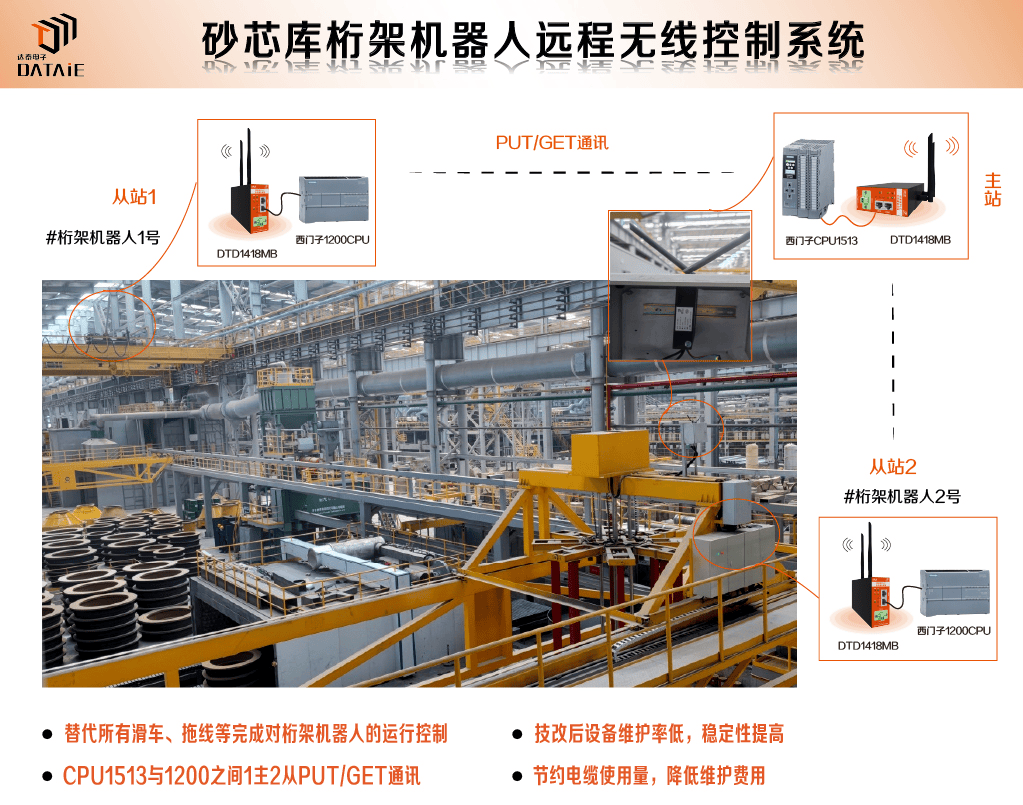
VGLite是NXP提供的輕量級(jí)2D圖形API,本文將手把手帶你實(shí)現(xiàn)VGLite圖形驅(qū)動(dòng)適配RT-Thread�。文章分為上���、下兩篇��,將手把手教您移植。上篇對(duì)RT-ThreadNano內(nèi)核與Finsh組件進(jìn)行移植�,下篇?jiǎng)t教您改寫SDK中的VGLite代碼以將其適配到RT-ThreadNano中��。
2025-07-17 14:40:473160 
零基礎(chǔ)搭建本次實(shí)驗(yàn)將會(huì)使用到的軟件是Keil和STM32CubeMX,沒有這兩個(gè)軟件沒有請(qǐng)?jiān)诰W(wǎng)上自行下載�。本章節(jié)零基礎(chǔ)手把手教會(huì)你搭建最快捷、最簡(jiǎn)單的STM32代碼
2025-07-03 19:32:311190 《手把手教你做PC》系列直播課再度開播�!《KaihongOS筆記本電腦開發(fā)實(shí)戰(zhàn)第十二課:WIFI驅(qū)動(dòng)框架適配》將于07月02日19:00開播↑掃碼入群,領(lǐng)課程講義資料包↑深開鴻資深工程師親臨直播間
2025-07-01 08:08:03454 
感謝大家對(duì)Splashtop的熱情關(guān)注!目前我們的應(yīng)用已在蘋果AppStore及安卓GooglePlay全面上線����。但由于上架審核需要一定的時(shí)間���,所以暫時(shí)未登陸國(guó)內(nèi)應(yīng)用市場(chǎng)。不過�����,別擔(dān)心����,今天這份詳細(xì)指南將手把手教你如何在國(guó)內(nèi)安
2025-06-27 17:01:24534 
項(xiàng)目越大,越需要靠譜的版本控制系統(tǒng)���。Perforce P4不僅是Epic官方推薦的源代碼控制工具�,更是大廠團(tuán)隊(duì)協(xié)作的核心支持之一�����。如何配置P4+UE�����?手把手教你怎么用↓↓↓
2025-06-25 11:22:111247 
識(shí)別三個(gè)維度��,手把手教你高效完成防護(hù)器件選型���!一��、選型必看:核心參數(shù)解析不同防護(hù)器件的參數(shù)差異較大�����,抓住關(guān)鍵參數(shù)才能精準(zhǔn)匹配客戶的需求:TVS(瞬態(tài)電壓抑制二極管)
2025-06-11 14:19:42683 
《手把手教你做星閃無人機(jī)》系列直播課再度開播���!《KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)⑩:KaihongOSLite系統(tǒng)專題》↑掃碼入群,領(lǐng)課程講義資料包↑深開鴻資深工程師親臨直播間依托筆電實(shí)戰(zhàn)產(chǎn)品
2025-06-10 08:06:24427 使用BasicStation或PiWAN連接到TheThingsNetwork將樹莓派設(shè)置為L(zhǎng)oRaWAN網(wǎng)關(guān)乍一看可能令人望而生畏��,但有了合適的工具和指導(dǎo)���,它就會(huì)成為一個(gè)有意義的DIY網(wǎng)絡(luò)項(xiàng)目���。在本文中����,我們將介紹如何使用手動(dòng)構(gòu)建的BasicStation或基于Docker的PiWAN堆棧將樹莓派連接到TheThingsNetwork(TTN)��。但首先�,什
2025-06-09 16:23:401778 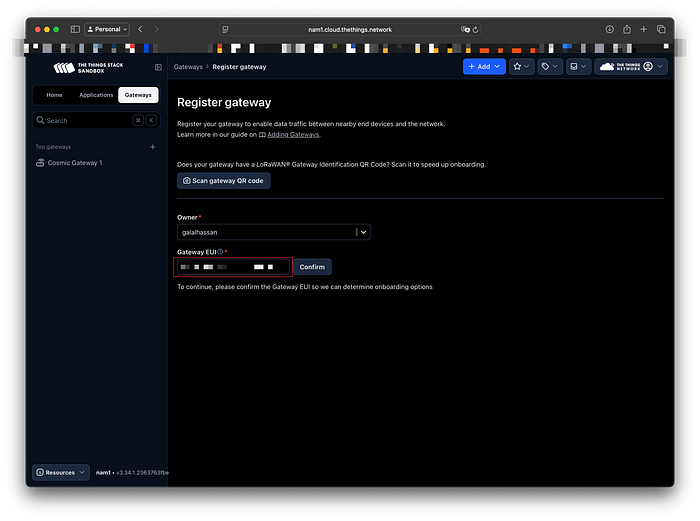
如果您對(duì)遠(yuǎn)程errDump調(diào)試功能感到陌生�,本教程將通過一步步操作演示,教您如何配置遠(yuǎn)程日志采集�����、解析errDump文件����,以及定位關(guān)鍵錯(cuò)誤信息,讓您輕松獨(dú)立完成調(diào)試任務(wù)�����。 下文特別分享errDump功能及Air8101開發(fā)板實(shí)操驗(yàn)證����。 一�、errDump功能介紹 1.1 errDump有什么用�? errDump是LuatOS系統(tǒng)中的錯(cuò)誤日志上報(bào)模塊,主要用于遠(yuǎn)程調(diào)試與故障診斷���。 其原理是將模塊運(yùn)行過程中產(chǎn)生的錯(cuò)誤信息或者應(yīng)用日志�����,通過TCP/UDP上報(bào)到互聯(lián)網(wǎng)上的指定服務(wù)器��,技術(shù)人員可以在服
2025-06-05 18:32:531005 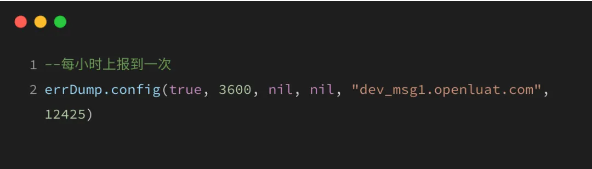
在高并發(fā)網(wǎng)絡(luò)服務(wù)場(chǎng)景中��,Linux內(nèi)核的默認(rèn)網(wǎng)絡(luò)參數(shù)往往無法滿足需求���,導(dǎo)致性能瓶頸、連接超時(shí)甚至服務(wù)崩潰���。本文基于真實(shí)案例分析��,從參數(shù)解讀、問題診斷到優(yōu)化實(shí)踐��,手把手教你如何調(diào)優(yōu)Linux網(wǎng)絡(luò)參數(shù)����,支撐百萬(wàn)級(jí)并發(fā)連接��。
2025-05-29 09:21:13758 《手把手教你做星閃無人機(jī)》系列直播課再度開播���!《KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)⑨:無線通信編程之SLE專題》↑掃碼入群,領(lǐng)課程講義資料包↑深開鴻資深工程師親臨直播間依托筆電實(shí)戰(zhàn)產(chǎn)品案例細(xì)致剖析
2025-05-27 08:05:45418 MIMO設(shè)備功率測(cè)量太復(fù)雜?TS-RadiMation幫你一鍵搞定�!本文詳細(xì)解析MIMO功率測(cè)量全流程,從配置到數(shù)據(jù)分析����,助你快速掌握關(guān)鍵測(cè)試技巧,提升測(cè)試效率���!
2025-05-26 17:42:05593 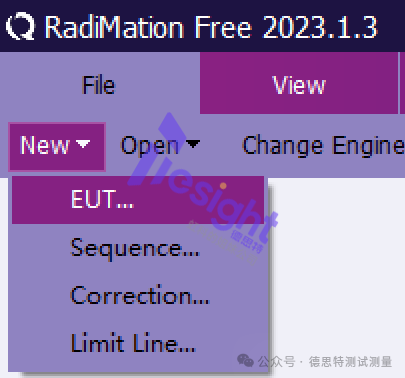
《手把手教你做PC》系列直播課再度開播�����!《KaihongOS筆記本電腦開發(fā)實(shí)戰(zhàn)第九課:全功能TypeC驅(qū)動(dòng)框架適配》將于5月21日19:00開播↑掃碼入群��,領(lǐng)課程講義資料包↑深開鴻資深工程師親臨直播
2025-05-20 08:07:51496 正點(diǎn)原子Linux系列全新視頻教程來啦!手把手教你MP257開發(fā)板�,讓您輕松入門!
一����、視頻觀看
正點(diǎn)原子手把手教你學(xué)STM32MP257-第1期:https://www.bilibili.com/video/BV1UtEizyE7Z
二、更多詳細(xì)介紹
2025-05-16 10:42:23
針對(duì)全棧開發(fā)者設(shè)計(jì)的實(shí)戰(zhàn)教程��,本文聚焦LuatOS平臺(tái)log庫(kù)的高效使用�����,從基礎(chǔ)配置到高級(jí)調(diào)試策略���,手把手教你搭建可擴(kuò)展的日志系統(tǒng)���,提升項(xiàng)目維護(hù)效率。 今天���,我們一起來認(rèn)識(shí)LuatOS的log庫(kù)
2025-05-12 15:23:301380 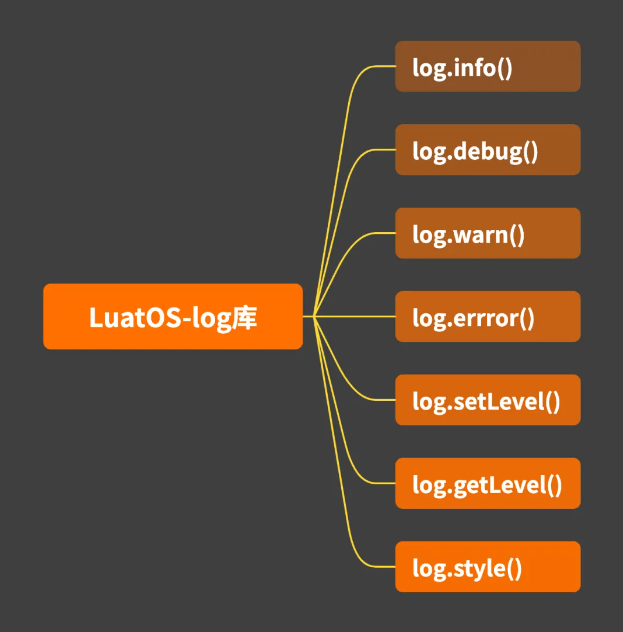
都會(huì)覺得無從下手����。別擔(dān)心���!這篇文章將用通俗易懂的方式����,帶你了解 CentOS 中的防火墻配置����,并通過一個(gè)實(shí)際案例,手把手教你如何正確設(shè)置防火墻規(guī)則����。
2025-05-08 11:52:03978 
《手把手教你做PC》系列直播課再度開播��!《KaihongOS筆記本電腦開發(fā)實(shí)戰(zhàn)⑦:Audio音頻驅(qū)動(dòng)框架適配》將于4月23日19:00開播↑掃碼入群�,領(lǐng)課程講義資料包↑深開鴻資深工程師親臨直播間依托
2025-04-22 08:05:41493 注意事項(xiàng)�,從安裝準(zhǔn)備到后期維護(hù),手把手教你正確操作��,確保監(jiān)測(cè)數(shù)據(jù)真實(shí)可靠!一��、安裝前:做好3項(xiàng)準(zhǔn)備��,事半功倍1.檢查設(shè)備完整性開箱驗(yàn)貨:核對(duì)測(cè)縫計(jì)型號(hào)����、配件(護(hù)管、
2025-04-21 15:31:47461 
困惑�。別擔(dān)心!接下來南京峟思手把手教你正確使用VW-102A讀數(shù)儀,快速獲取精準(zhǔn)數(shù)據(jù)!一、VW-102A讀數(shù)儀是什么?為什么需要它?VW-102A讀數(shù)儀是專門為振
2025-04-21 14:28:41638 
總結(jié)���,手把手教你逆襲甩鍋。Modbus TCP常見問題主要包括連接建立����、錯(cuò)誤代碼識(shí)別、數(shù)據(jù)處理和地址沖突等��。 以下是一些常見問題的解答: 問題一: 如何判斷Modbus TCP連接是否建立�? 答:進(jìn)行
2025-04-16 17:17:571259 
;HelloWorld"到"Hey,AI"記得剛?cè)胄袝r(shí),點(diǎn)亮一個(gè)LED燈都激動(dòng)半天��。如今�,我們的嵌入式設(shè)備已經(jīng)可以直接和AI大模型對(duì)話了!這不僅是技術(shù)的進(jìn)步��,更是開發(fā)思路的革命���。今天���,我將手把手教大家如何在開發(fā)板上接
2025-04-11 18:19:081889 
博主好!致敬葉濤 管鍇 張心雨三位AI具身智能-智能體方面的專家、導(dǎo)師�!
《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》一不懂編程的多數(shù)大眾也可以開發(fā)Agent,這意義深遠(yuǎn)�,功德無量
2025-04-10 12:16:28
一、物理層深度剖析 1.1 差分信號(hào)的本質(zhì) CAN總線采用****雙線差分傳輸 �,核心原理圖解: markdown CAN_H ────── /───────── / ___ / CAN_L ──────/ ───────── 顯性狀態(tài)(Dominant) :CAN_H電壓 ≥ 2.5V,CAN_L ≤ 1.5V → 差值≥1V 隱性狀態(tài)(Recessive) :CAN_H/CAN_L均為2.5V → 差值≈0V 物理層參數(shù)對(duì)照表 : 參數(shù) 標(biāo)準(zhǔn)值 測(cè)試方法 終端電阻 120Ω ±1% 萬(wàn)用表直接測(cè)量 最大傳輸距離 10km @ ≤5Kbps 示波器+時(shí)延測(cè)試儀 波特率容差 ±1% 專用CAN分析儀
2025-04-10 11:10:291054 一��、物理層深度剖析
1.1 差分信號(hào)的本質(zhì)
CAN總線采用****雙線差分傳輸�,核心原理圖解:
markdown
CAN_H ──────\\\\ /─────────
\\\\/
\\\\___/
CAN_L ──────/\\\\─────────
顯性狀態(tài)(Dominant):CAN_H電壓 ≥ 2.5V,CAN_L ≤ 1.5V → 差值≥1V
隱性狀態(tài)(Recessive):CAN_H/CAN_L均為2.5V → 差值≈0V
物理層參數(shù)對(duì)照表:
參數(shù)
標(biāo)準(zhǔn)值
測(cè)試方法
終端電阻
120Ω ±1%
萬(wàn)用表直接測(cè)量
最大傳輸距離
10km @ ≤5Kbps
示波器+時(shí)延測(cè)試儀
波特率容差
±1%
專用CAN分析儀
共模電壓抑制
±2V
隔離示波器測(cè)量
1.2 波特率計(jì)算公式
markdown
位時(shí)間 = 同步段 + 傳播時(shí)間段 + 相位緩沖段1 + 相位緩沖段2
總位數(shù) = 同步段(SJW) + 時(shí)間段1(TS1) + 時(shí)間段2(TS2)
STM32配置示例(500Kbps):
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ; // 同步跳轉(zhuǎn)寬度=1TQ
hcan1.Init.TimeSeg1 = CAN_BS1_9TQ;// 時(shí)間段1=9TQ
hcan1.Init.TimeSeg2 = CAN_BS2_4TQ;// 時(shí)間段2=4TQ
// 總位時(shí)間=1+9+4=14TQ → 時(shí)鐘頻率=8MHz → TQ=0.125μs → 波特率=1/(14 * 0.125μs)=500Kbps
1.3 終端電阻調(diào)試技巧
錯(cuò)誤現(xiàn)象:總線波形畸變���、通信不穩(wěn)定
檢測(cè)方法:
斷電測(cè)量總線兩端電阻(應(yīng)為120Ω±5%)
上電后用示波器觀察終端反射波形
解決方案:
# 終端電阻計(jì)算公式(單位Ω)
def calc_termination_resistance(length):
# 每米電纜約60Ω特性阻抗
return 120 - (length * 60) / 1000
# 示例:總線長(zhǎng)度40m → 120 - 24 = 96Ω → 需補(bǔ)48Ω電阻
二����、數(shù)據(jù)鏈路層全解析(幀結(jié)構(gòu)+仲裁機(jī)制)
2.1 CAN幀類型對(duì)比表
幀類型
標(biāo)識(shí)符長(zhǎng)度
用途
DLC最大值
標(biāo)準(zhǔn)幀
11位
普通數(shù)據(jù)傳輸
8字節(jié)
擴(kuò)展幀
29位
復(fù)雜設(shè)備通信
8字節(jié)
遠(yuǎn)程幀
11/29位
請(qǐng)求數(shù)據(jù)
-
錯(cuò)誤幀
-
錯(cuò)誤通知
-
2.2 經(jīng)典仲裁過程演示
場(chǎng)景:三個(gè)節(jié)點(diǎn)同時(shí)發(fā)送數(shù)據(jù)
markdown
節(jié)點(diǎn)A: ID=0x100 (0b000100000000)
節(jié)點(diǎn)B: ID=0x200 (0b001000000000)
節(jié)點(diǎn)C: ID=0x080 (0b000010000000)
仲裁過程:
第一位:全顯性 → 繼續(xù)比較
**第二位:A=0, B=0, C=1 → C失去仲裁權(quán)**
后續(xù)位比較后�����,A勝出總線使用權(quán)
STM32仲裁配置要點(diǎn):
// 使能自動(dòng)重傳功能(默認(rèn)開啟)
hcan1.Init.AutoRetransmission = ENABLE;
// 設(shè)置重試次數(shù)(最大16次)
hcan1.Init.RetryCount = 3;
2.3 錯(cuò)誤檢測(cè)機(jī)制詳解
五級(jí)錯(cuò)誤防護(hù)體系:
CRC校驗(yàn):15位循環(huán)冗余校驗(yàn)
位填充:每5個(gè)相同電平插入相反電平
ACK校驗(yàn):接收節(jié)點(diǎn)必須發(fā)送顯性確認(rèn)
幀格式校驗(yàn):7個(gè)保留位必須為隱性
總線監(jiān)控:持續(xù)檢測(cè)總線邏輯電平
錯(cuò)誤計(jì)數(shù)器動(dòng)態(tài)調(diào)整算法:
markdown
當(dāng)檢測(cè)到錯(cuò)誤時(shí):
TEC += 8(發(fā)送錯(cuò)誤)或 REC += 1(接收錯(cuò)誤)
當(dāng)TEC > 127時(shí):進(jìn)入總線關(guān)閉狀態(tài)
2.4 位時(shí)間同步技術(shù)
同步機(jī)制:
硬同步:在幀起始位強(qiáng)制對(duì)齊
重新同步:通過調(diào)整時(shí)間段2補(bǔ)償時(shí)鐘偏差
STM32時(shí)間參數(shù)配置示例:
// 配置同步跳轉(zhuǎn)寬度為1個(gè)時(shí)間量子
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
?
// 時(shí)間段分配(假設(shè)系統(tǒng)時(shí)鐘16MHz)
CAN_BtrTypeDef sCanBtr;
sCanBtr.SyncJumpWidth = CAN_SJW_1TQ;
sCanBtr.TimeSeg1 = CAN_BS1_9TQ;// 傳播延遲補(bǔ)償
sCanBtr.TimeSeg2 = CAN_BS2_4TQ;// 相位緩沖
三�、數(shù)據(jù)鏈路層核心機(jī)制
3.1 CAN協(xié)議棧全景圖
應(yīng)用層(CANopen/J1939)
↓
網(wǎng)絡(luò)層(路由/錯(cuò)誤處理)
↓
數(shù)據(jù)鏈路層(幀結(jié)構(gòu)/仲裁)
↓
物理層(差分信號(hào)/終端電阻)
3.2 幀結(jié)構(gòu)深度拆解
標(biāo)準(zhǔn)幀格式(11位ID):
| 仲裁場(chǎng)(11b) | 控制場(chǎng)(6b) | 數(shù)據(jù)場(chǎng)(0-8B) | CRC場(chǎng)(15b) | ACK場(chǎng)(1b) | 幀結(jié)束(7b) |
仲裁場(chǎng):包含節(jié)點(diǎn)ID和幀類型標(biāo)識(shí)
控制場(chǎng):DLC(數(shù)據(jù)長(zhǎng)度碼) + IDE(擴(kuò)展標(biāo)識(shí)符)
CRC場(chǎng):15位循環(huán)冗余校驗(yàn)(生成多項(xiàng)式:x1?+x1?+...+1)
STM32 CRC配置示例:
// CAN1 CRC初始化
hcan1.Instance->CRCD = 0xFFFF; // 初始值
hcan1.Instance->CRCSA = 0x0000;// 起始地址
3.3 仲裁機(jī)制詳解
29位擴(kuò)展幀仲裁過程:
優(yōu)先級(jí)位 → 源地址 → 參數(shù)組號(hào)(PGN)
優(yōu)先級(jí)計(jì)算:ID31-ID26位決定(數(shù)值越小優(yōu)先級(jí)越高)
源地址沖突檢測(cè):同一網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)地址必須唯一
仲裁時(shí)序仿真:
def can_arbitration(id_list):
sorted_ids = sorted(id_list, key=lambda x: bin(x).count(\'1\'))
return sorted_ids[0]
?
# 示例:三個(gè)節(jié)點(diǎn)同時(shí)發(fā)送
nodes = [0x18FEF100, 0x18FEF200, 0x18FEF300]
winner = can_arbitration(nodes)# 輸出0x18FEF100
四、CANopen協(xié)議深度實(shí)戰(zhàn)
4.1 對(duì)象字典(Object Dictionary)
OD結(jié)構(gòu)示例:
索引類型描述
0x2000ARRAY 電機(jī)控制參數(shù)
0x2000[0]UINT16目標(biāo)轉(zhuǎn)速(rpm)
0x2000[1]FLOAT 加速度(m/s2)
0x2001RECORD故障代碼
0x2001[0]BITFIELD 故障標(biāo)志位
STM32 SDO傳輸實(shí)現(xiàn):
// SDO客戶端上傳數(shù)據(jù)
void SDO_Upload(uint16_t index, uint8_t subindex) {
CO_SDO_Req req;
CO_SDO_ReqInit(&req);
req.Cmd = CO_SDO_CMD_UPLOAD_REQ;
req.Index = index;
req.SubIndex = subindex;
if (CO_SDO_Transmit(&req) == CO_SDO_OK) {
Process_SDO_Response(req.Data);
}
}
4.2 NMT網(wǎng)絡(luò)管理
狀態(tài)遷移圖:
INIT → PRE-OPERATIONAL → OPERATIONAL → STOPPED
↑↑↓
└──RESET←───────────────────┘
心跳報(bào)文配置:
// 心跳生產(chǎn)者配置
CO_NMT_HeartbeatConfig(0x01, 0x00, 500);// 節(jié)點(diǎn)ID=1���,周期500ms
五����、J1939協(xié)議核心要點(diǎn)
5.1 參數(shù)組號(hào)(PGN)編碼規(guī)則
PGN = PF(8b) << 8 | PS(8b)
PF: 參數(shù)組功能(0-255)
PS: 參數(shù)組子功能(0-255)
典型PGN解析:
PGN
PF
PS
描述
0xFEFC
0xFE
0xFC
發(fā)動(dòng)機(jī)轉(zhuǎn)速請(qǐng)求
0xFEF0
0xFE
0xF0
冷卻液溫度
0xFECA
0xFE
0xCA
車輛位置報(bào)告
5.2 多包數(shù)據(jù)傳輸
傳輸流程:
請(qǐng)求 → 確認(rèn) → 數(shù)據(jù)包1 → 數(shù)據(jù)包2 → ... → 結(jié)束符
STM32多包發(fā)送實(shí)現(xiàn):
// 多包數(shù)據(jù)發(fā)送(最大12字節(jié)/包)
void CAN_Send_MultiPacket(uint8_t *data, uint16_t length) {
uint8_t packets[6][8] = {0};
uint8_t packet_count = (length + 7) / 8;
for (int i=0; i<packet_count; i++) {
packets[i][0] = 0x00;// 流控制字段
memcpy(&packets[i][1], &data[i*8], 8);
CAN_TransmitPacket(packets[i]);
}
}
六、STM32HAL庫(kù)實(shí)戰(zhàn)進(jìn)階
6.1 完整初始化流程
// 1. GPIO配置(CubeMX生成)
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
// CAN_RX/TX引腳配置
GPIO_InitStruct.Pin = GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
?
// 2. CAN初始化(含過濾器配置)
void MX_CAN1_Init(void)
{
CAN_HandleTypeDef hcan1;
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 5;// 500Kbps
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_9TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_4TQ;
hcan1.Init.Mode = CAN_MODE_NORMAL;
if (HAL_CAN_Init(&hcan1) != HAL_OK) {
Error_Handler();
}
// 濾波器配置(接收ID=0x100-0x1FF)
CAN_FilterTypeDef sFilterConfig = {0};
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x100 << 13;
sFilterConfig.FilterIdLow = 0x1FF << 13 | 0xFFFF;
HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig);
}
6.2 數(shù)據(jù)收發(fā)實(shí)戰(zhàn)
// 數(shù)據(jù)發(fā)送(PDO模擬)
void CAN_Send_PDO(uint8_t node_id, uint16_t position) {
CAN_TxHeaderTypeDef TxHeader = {0};
uint8_t TxData[8] = {0};
TxHeader.StdId = 0x200 + node_id;// PDO ID
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 2;
TxData[0] = (position >> 8) & 0xFF;
TxData[1] = position & 0xFF;
HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox);
}
?
// 接收回調(diào)(帶錯(cuò)誤檢測(cè))
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) {
CAN_RxHeaderTypeDef RxHeader;
uint8_t RxData[8] = {0};
if (HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) {
if (RxHeader.DLC != 2) {
// 數(shù)據(jù)長(zhǎng)度異常處理
return;
}
uint16_t value = (RxData[0] << 8) | RxData[1];
Process_Sensor_Data(value);
}
}
七���、工業(yè)級(jí)應(yīng)用案例解析
7.1 電動(dòng)汽車三電系統(tǒng)
BMS電池管理:通過CAN總線監(jiān)控單體電壓/溫度
電機(jī)控制器:接收扭矩指令并反饋轉(zhuǎn)速
OBC車載充電機(jī):與BMS通信實(shí)現(xiàn)充電保護(hù)
通信拓?fù)洌?BMS → CAN → MCU → CAN → 電機(jī)控制器
↑↓
充電樁
7.2 智能倉(cāng)儲(chǔ)機(jī)器人
多機(jī)協(xié)同:50+臺(tái)AGV通過CAN總線同步路徑規(guī)劃
實(shí)時(shí)監(jiān)控:電量/故障狀態(tài)實(shí)時(shí)上報(bào)
抗干擾方案:
雙絞線屏蔽層接地
隔離收發(fā)器(如ADuM1201)
冗余幀重傳機(jī)制
八��、調(diào)試與優(yōu)化技巧
示波器觀察:
檢查CAN_H/CAN_L差分波形(正常應(yīng)為方波)
波特率驗(yàn)證(500Kbps對(duì)應(yīng)周期2μs)
錯(cuò)誤分析:
錯(cuò)誤幀計(jì)數(shù):HAL_CAN_GetError(&hcan1)
總線負(fù)載率:CAN總線分析儀檢測(cè)
性能優(yōu)化:
使用CAN FD(Flexible Data Rate)提升帶寬
優(yōu)化過濾器配置減少CPU開銷
采用環(huán)形緩沖區(qū)處理高頻率數(shù)據(jù)
九�、擴(kuò)展學(xué)習(xí)資源
經(jīng)典CAN vs CAN FD:帶寬從1Mbps提升至5Mbps
AUTOSAR架構(gòu):標(biāo)準(zhǔn)化汽車軟件架構(gòu)
TSN時(shí)間敏感網(wǎng)絡(luò):工業(yè)4.0通信新標(biāo)準(zhǔn)
2025-04-10 11:08:08
隨著工業(yè)自動(dòng)化和信息化的快速發(fā)展,不同系統(tǒng)之間需要高效�、靈活地進(jìn)行數(shù)據(jù)交互與通信。然而����,各系統(tǒng)往往采用不同的通信協(xié)議和報(bào)文格式,導(dǎo)致數(shù)據(jù)傳輸存在兼容性問題��。軟件網(wǎng)關(guān)應(yīng)運(yùn)而生�����,它通過圖形界面配置、零代碼開發(fā)的方式���,實(shí)現(xiàn)報(bào)文的靈活映射與轉(zhuǎn)發(fā)�。這種模塊化設(shè)計(jì)不僅降低了開發(fā)難度和成本����,還提高了系統(tǒng)的可擴(kuò)展性和維護(hù)性,能夠滿足復(fù)雜多變的工業(yè)場(chǎng)景需求�����,為系統(tǒng)集成與數(shù)據(jù)交
2025-04-03 20:02:561163 
為例����,給大家從測(cè)量范圍、精度��、環(huán)境適應(yīng)性三大核心維度����,手把手教你選對(duì)型號(hào)!第一步:明確工程監(jiān)測(cè)需求選型前需明確以下問題:1、監(jiān)測(cè)目標(biāo):需監(jiān)測(cè)的縫寬變化范圍是多大?
2025-04-03 10:58:41654 
在土木工程中���,振弦式土體沉降計(jì)是監(jiān)測(cè)土石壩�、邊坡、地基等沉降變形的“眼睛”�����。但想要它精準(zhǔn)工作���,安裝步驟是關(guān)鍵!如果埋設(shè)不當(dāng)或組件連接錯(cuò)誤����,可能導(dǎo)致數(shù)據(jù)偏差甚至設(shè)備損壞�。南京峟思將一步步為大家解析振弦式土體沉降計(jì)的安裝流程,從鉆孔到調(diào)試�����,幫你避開常見“坑點(diǎn)”�,確保測(cè)量結(jié)果可靠耐用!一����、安裝前:準(zhǔn)備工作別馬虎工具備齊,事半功倍鉆孔工具:鉆孔機(jī)(孔徑≥90mm)����、
2025-04-03 10:20:44536 
的今天�,高端顯卡維修已成“暴利暗流”。虛高報(bào)價(jià)���、偷換配件����、技術(shù)陷阱……用戶稍有不慎���,輕則損失數(shù)萬(wàn)��,重則設(shè)備報(bào)廢�。今天小助手將揭露行業(yè)亂象�����,手把手教你識(shí)別套路����,并推薦
2025-04-02 20:31:443453 甚至微型服務(wù)器時(shí)�����,你是否也遇到過程序卡頓����、視頻處理延遲的尷尬?今天我們就手把手教你用Python并行處理技術(shù)����,讓樹莓派的性能瞬間翻倍!歡迎在評(píng)論區(qū)曬出你的優(yōu)化方案����,
2025-03-26 17:08:28757 
在物聯(lián)網(wǎng)開發(fā)領(lǐng)域���,選擇合適的硬件平臺(tái)與操作系統(tǒng)是項(xiàng)目成功的關(guān)鍵。本文將帶領(lǐng)你從零開始��,通過詳細(xì)的步驟與示例代碼���,掌握Air780EPM與LuatOS的入門開發(fā)流程�����,并深入探討其核心功能與擴(kuò)展?jié)摿Α?? 一���、必須先要告訴你的一些廢話 這里�,先要告訴你一些前提條件��,雖然聽著像是廢話�,但是如果你不知道的話,可能后面會(huì)比較懵逼��,所以還是希望你能夠認(rèn)真看一看這一節(jié)���。 這個(gè)項(xiàng)目的產(chǎn)品定義是:模組每隔3秒���,就往串口輸出一次 “ hello world” 字符
2025-03-25 16:38:31570 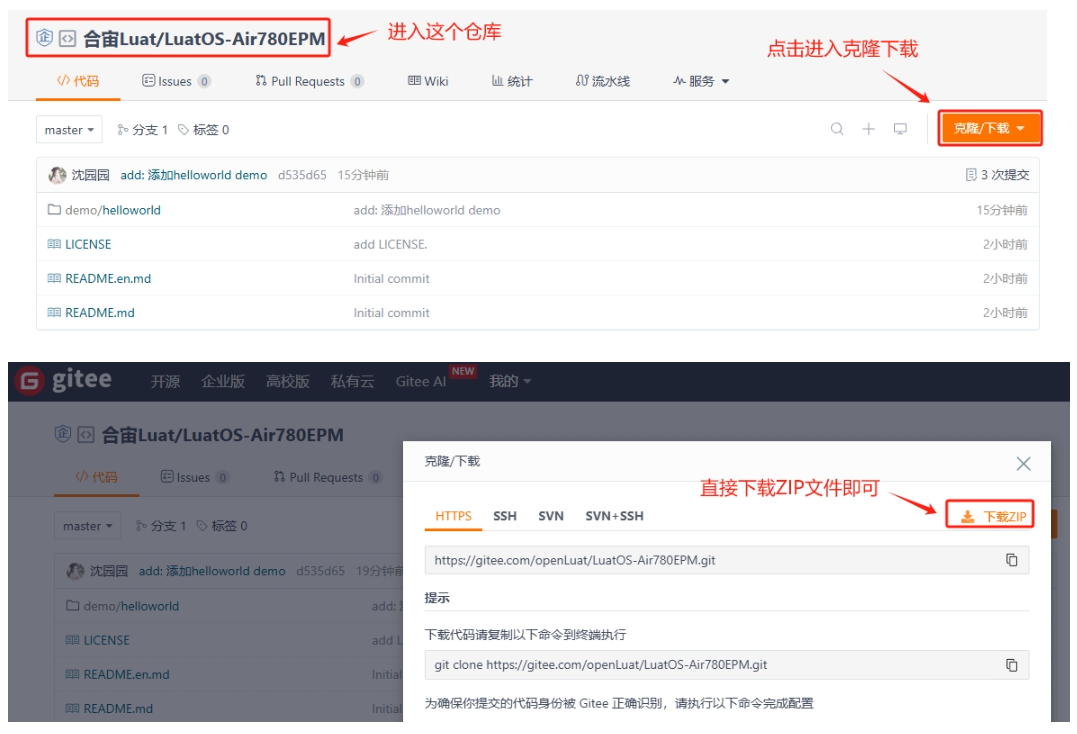
Developer Ethan 同學(xué),手把手教您編譯/構(gòu)建 KiCad 源碼: 開發(fā)工具安裝 環(huán)境變量配置 使用 VS2022 構(gòu)建 KiCad 參與直播的小伙伴還有機(jī)會(huì)獲得 KiCon Badge
2025-03-24 11:14:001472 
資料介紹:
STM32Cube學(xué)習(xí)筆記��,一步一步手把手帶你進(jìn)入STM32Cube的世界��,包括點(diǎn)燈����,按鍵�����,串口�����,ADC,DAC等等一共16篇�。
純分享貼��,有需要可以直接下載附件獲取完整資料�����!
(如果內(nèi)容有幫助可以關(guān)注���、點(diǎn)贊�、評(píng)論支持一下哦~)
2025-03-22 17:02:25
介紹本文適用于零基礎(chǔ)����,手把手教你搭建基于STM32單片機(jī)控制億佰特E22-M系列���、E220-M系列和E32-M系列模塊�,旨在降低M系列模塊開發(fā)難度,幫助大家更快上手M系列的模組����。本次教程分為“上篇
2025-03-20 19:33:08728 《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》是一本為普通人量身打造的AI開發(fā)指南。它不僅深入淺出地講解了Agent的概念和發(fā)展���,還通過詳細(xì)的工具介紹和實(shí)戰(zhàn)案例���,幫助讀者快速掌握
2025-03-18 12:03:28
為助力開發(fā)者迅速掌握『KaihongOS輕量系統(tǒng)開發(fā)技術(shù)』與『星閃無線通信技術(shù)』,實(shí)現(xiàn)快速上手與深度體驗(yàn)���,“開鴻Developer社區(qū)”攜手“電子發(fā)燒友”再次聯(lián)合推出《手把手教你做星閃無人機(jī)
2025-03-18 10:33:15
”攜手“電子發(fā)燒友”聯(lián)合推出了 《KaihongOS手把手系列直播課程》�,該系列課程以實(shí)際產(chǎn)品為案例��,詳細(xì)講解每個(gè)產(chǎn)品的開發(fā)全流程����。
此次首發(fā)內(nèi)容是《手把手教你做PC-KaihongOS筆記本電腦開發(fā)
2025-03-18 10:25:04
4G模組Air780EPM作為廣和通推出的高性能Cat.1bis無線通信模塊�,憑借其低功耗、高集成度及豐富的外設(shè)接口�����,在工業(yè)物聯(lián)網(wǎng)、智能終端�、車載設(shè)備等領(lǐng)域展現(xiàn)出卓越的適配性。 一���、概述 ? 開發(fā)方式 :Air780EPM 僅支持 LuatOS 軟件開發(fā)方式���,不支持 AT 指令開發(fā)方式。若使用 AT 指令開發(fā)方式�,可選擇 Air780EQ。 LuatOS 開發(fā)優(yōu)勢(shì) :相對(duì) C-SDK 入門更簡(jiǎn)單�����,開發(fā)更方便���,開發(fā)時(shí)間更快。 適用對(duì)象 :本文的 GPIO 設(shè)計(jì)指導(dǎo)針對(duì) Air780EPM 用于 LuatOS 開發(fā)方式時(shí)的注意事項(xiàng)��。 G
2025-03-17 16:07:20928 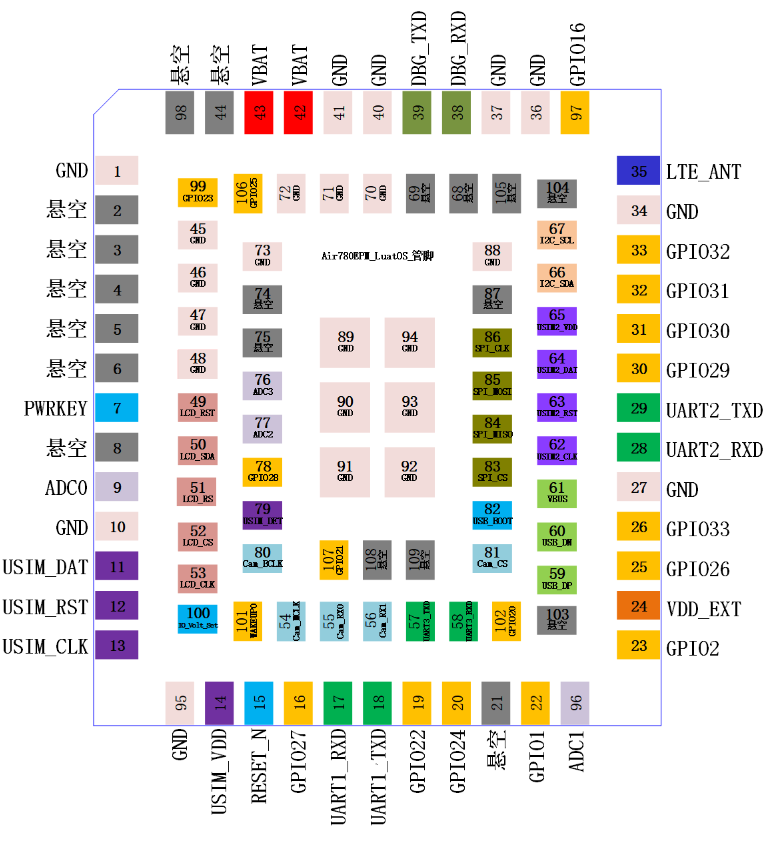
【第四章 定時(shí)任務(wù)】手把手教你玩轉(zhuǎn)新版正點(diǎn)原子云
承接上篇�����,除了報(bào)警聯(lián)動(dòng)這個(gè)功能,原子云還有一個(gè)特色功能也是各開發(fā)者喜歡用的���,定時(shí)任務(wù)功能����。
【正點(diǎn)原子】云平臺(tái):原子云(點(diǎn)擊登錄原子云)
前言
2025-03-13 10:19:45
本帖最后由 jf_85110202 于 2025-3-13 14:43 編輯
【第三章 警報(bào)聯(lián)動(dòng)】手把手教你玩轉(zhuǎn)新版正點(diǎn)原子云
新版原子云網(wǎng)址:原子云(點(diǎn)擊登錄原子云)
原子云特色功能:設(shè)置
2025-03-12 16:05:20
【第二章 模型與設(shè)備連接】手把手教你玩轉(zhuǎn)新版正點(diǎn)原子云玩過物聯(lián)網(wǎng)的朋友們都知道,我們?cè)诮佑|各大主流云平臺(tái)時(shí)會(huì)知道物模型的概念�。
本實(shí)驗(yàn)就是針對(duì)原子云中模型與設(shè)備連接�,舉個(gè)簡(jiǎn)單例子說明,溫度傳感器通過
2025-03-12 09:27:14
的新技術(shù)實(shí)踐指南�����,助你把握科技大勢(shì)�����。
▊《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》
葉濤管鍇張心雨 著
不懂編程也可以開發(fā)Agent
Agent(智能體)是大模型落地的重要方向
2025-03-10 16:29:54
【第一章 透?jìng)鞑呗浴?b class="flag-6" style="color: red">手把手教你玩轉(zhuǎn)新版正點(diǎn)原子云
1. 本次實(shí)驗(yàn)使用正點(diǎn)原子D40 Mini 4G Cat1 DTU數(shù)傳模塊
1.1 D40數(shù)傳模塊資料
具體使用和資料下載可到:D40 Mini
2025-03-05 16:52:19
開發(fā)者集結(jié)���!《手把手教你做星閃無人機(jī)》第二課開講啦�!
2025-02-17 19:40:50703 
帶來的現(xiàn)實(shí)���。無論你是開發(fā)者�、研究員���、內(nèi)容創(chuàng)作者��,還是 AI 愛好者�����,OpenAI 強(qiáng)大的語(yǔ)言模型都能為你的工作和生活帶來無限可能���。 本指南將手把手教你獲取并使用 OpenAI API 密鑰����,從零基礎(chǔ)到高級(jí)應(yīng)用�����,全程無障礙�����!針對(duì)中國(guó)用戶���,我們提供獨(dú)家優(yōu)化方案�����,讓你輕松繞過
2025-02-15 17:26:435582 
導(dǎo)讀面對(duì)一臺(tái)ZMC600E運(yùn)動(dòng)控制器與多臺(tái)伺服電機(jī)�����,我們?cè)撛鯓幼屗ぷ髌饋?��?本文帶你了解PLCOPen��,并詳細(xì)講解如何使用AWStudio控制電機(jī)運(yùn)動(dòng)�����。在自動(dòng)化領(lǐng)域����,運(yùn)動(dòng)控制是一件很復(fù)雜的事情�����,包含了上位機(jī)通訊���,工業(yè)現(xiàn)場(chǎng)總線通信協(xié)議�,運(yùn)動(dòng)控制算法��,伺服電機(jī)控制等領(lǐng)域知識(shí)�����。致遠(yuǎn)電子自主研發(fā)的AWStudio的AWPLC解決方案可以快速實(shí)現(xiàn)運(yùn)動(dòng)控制編程���。AWSt
2025-02-10 11:38:231217 
在這篇教程中����,將教你使用Arduino創(chuàng)建一個(gè)互動(dòng)式LED墻壁時(shí)鐘���。這個(gè)項(xiàng)目結(jié)合了創(chuàng)意和技術(shù)���,設(shè)計(jì)出一個(gè)功能性強(qiáng)且視覺效果驚人的時(shí)鐘,它配備了互動(dòng)式的LED燈����。無論你是Arduino的新手還是已有
2025-02-08 17:47:12
”再次聯(lián)合推出《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程����,該課程與《手把手教你做PC—KaihongOS筆記本電腦開發(fā)實(shí)戰(zhàn)》同步并行���,
2025-01-13 19:42:52921 直播預(yù)告看了這么多期直播,你是否也會(huì)好奇?NVH實(shí)際用起來難不難��?不同類型故障的探頭布置有何差異�?軟件該如何設(shè)置?燃油車與新能源電車測(cè)試時(shí)有何不同����?我們又為何總是強(qiáng)調(diào),維修后再次診斷的重要性���?關(guān)于這些問題���,你都可以在我們本周的直播中找到答案!本周四���,1月9日晚8點(diǎn)�����,全國(guó)技術(shù)能手�����、上海市五一勞動(dòng)獎(jiǎng)?wù)芦@得者——林創(chuàng)創(chuàng)老師���,將空降虹科Pico直播間�!從汽修冠軍到經(jīng)
2025-01-08 11:40:59824 
”攜手“電子發(fā)燒友”聯(lián)合推出了《KaihongOS手把手系列直播課程》���,該系列課程以實(shí)際產(chǎn)品為案例,詳細(xì)講解每個(gè)產(chǎn)品的開發(fā)全流程����。此次首發(fā)內(nèi)容是《手把手教你做PC-
2025-01-06 20:46:51916
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論