KUKA機器人與PC服務(wù)器連接時常需要編寫XML文件!它是什么呢?
良好格式的XML文檔必須有一個根元素,就是緊接著聲明后面建立的第一個元素,其他元素都是這個根元素的子....
幫朋友看了一下KUKA機器人的擺動(WEAVING編織運動)
該變量最多可用于編程6個函數(shù)發(fā)生器。函數(shù)發(fā)生器僅對CP運動有效。僅評估主運行變量。
可以在機器人程....

MATLAB是什么軟件呢?
這個清單里的實體,如果和美國企業(yè)做進出口貿(mào)易,要取得美國商務(wù)部批準,包括硬件和軟件。MATLAB 被....
分析服務(wù)器程序和機器人控制系統(tǒng)之間的數(shù)據(jù)交換
ETHERNETKRL用于視覺抓取和PC通訊的大數(shù)據(jù)量數(shù)據(jù)快速交換!采用報文形式連接,機器人使用XM....
詳解變頻器的基本電路框圖
主回路輸入三相交流電壓后,由三相全波橋式整流,再經(jīng)電容濾波后得到500V左右的直流電壓,最后由SPW....
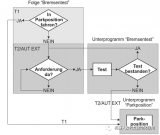
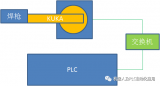
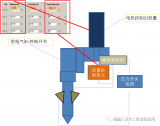
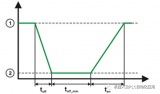
KUKA機器人之PFO飛行焊控制
機器人在執(zhí)行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA 用戶程序記錄焊道的程序號,....
令人作嘔的KPI是什么?
其可以是部門主管明確部門的主要責任,并以它為基礎(chǔ),來明確部門人員的業(yè)績衡量指標。做好績效管理的關(guān)鍵是....
KUKA內(nèi)部EtherCAT總線及故障診斷
EtherCAT(以太網(wǎng)控制自動化技術(shù))是一個開放架構(gòu),以以太網(wǎng)為基礎(chǔ)的現(xiàn)場總線系統(tǒng),其名稱的CAT....



鋁打磨間的PID控制冷卻系統(tǒng)的控制與升溫系統(tǒng)的控制!
FB41用于通過使用連續(xù)的變量輸出在SIMATIC S7控制系統(tǒng)中實現(xiàn)技術(shù)過程控制。除了設(shè)定點操作和....

帶你了解螺柱焊簡史
螺柱焊設(shè)備是大量應(yīng)用于整車生產(chǎn)的常用裝備.通常與機器人配合使用,也有部分手動螺柱焊設(shè)備.
KUKA機器人工具負載學(xué)習(xí)
附加負載數(shù)據(jù)必須輸入機器人控制系統(tǒng)。必要的數(shù)據(jù)包括:
n 質(zhì)量 (m),單位:kg
n 物體重心....


你知道-ON_OFF的使用嗎?
If (R_TRIG_SK90_ZutrittAnfo.Q Or F_TRIG_K90_Zutrit....

KUKA.Ethernet KRL 個人學(xué)習(xí)心得.
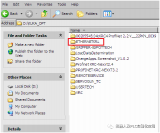
通過 XML 文件配置以太網(wǎng)連接。針對每個連接,必須在機器人控制系統(tǒng)的目錄 C:KRCROBOTER....
KUKA機器人之Load data determination計算負載數(shù)據(jù)的應(yīng)用分析
一軸可以為任意位置,A2 = -90 度,A3 = 90 度,A4 = 0度,A5 = 0度,....

![$APP_INT[5]與?固定焊鉗MAKROSTEP的使用](https://file.elecfans.com/web1/M00/C0/16/pIYBAF768g6AbTUOAABT9ZWMBiY416.png)
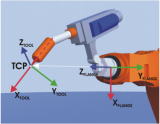
實操:KUKA機器人創(chuàng)建工具坐標數(shù)據(jù)
通過一個固定參考點的工具坐標系的測量分為2步:首先確定工具坐標系的TCP點,然后確定工具坐標系的姿態(tài)....


KUKA 8.3系統(tǒng)節(jié)能功能使用分析
如果生產(chǎn)歇工很短,為了使用狀態(tài)驅(qū)動總線關(guān)閉,則可以用狀態(tài)制動器已制動節(jié)能。但是,只有在機器人控制系統(tǒng)....
定義結(jié)構(gòu)數(shù)據(jù)類型-STRUC
例如:對一輛汽車而言,發(fā)動機功率或里程數(shù)為整數(shù)型。對價格而言,實數(shù)型最適用。而空調(diào)設(shè)備的存在則與此相....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)